|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
RESUMEN Los modelos matemáticos de maniobrabilidad de barcos en tiempo acelerado, han contribuido para reproducir el comportamiento de los barcos al arribo y al zarpe de los puertos, tomando en cuenta las condiciones meteorológicas y oceanográficas en la zona de estudio. Para calcular la maniobrabilidad de dichos barcos, uno de los modelos matemáticos que se utiliza es el de Abkowitz (1964), el cual describe las ecuaciones del movimiento del barco. Con base a dichos modelos, se realizó un análisis del comportamiento de arribo de un barco en el puerto de Manzanillo, Colima, el cual se describe en el presente artículo, para ello se requirió conocer las condiciones batimétricas, de viento, de oleaje y de corrientes que se presentan en el puerto, con esta información se determinó la distancia mínima requerida para el arribo del barco al puerto.
INTRODUCCIÓN La maniobrabilidad de un barco ha sido necesaria desde que el hombre empezó a utilizar embarcaciones para poder navegar, anteriormente eran controladas por remos, los cuales producían una fuerza para que dicha embarcación se moviera hacia estribor o hacia babor, esta maniobra ha evolucionado a través del tiempo realizándose actualmente con timón, el cual ayuda a controlar los giros de dichas embarcaciones. A la capacidad de poder controlar la trayectoria del buque, la velocidad y la aceleración, se tomó como apoyo al recurso humano y a los equipos electrónicos y mecánicos, se le conoce como maniobrabilidad. Los sistemas de simulación de maniobras de embarcaciones han sido desarrollados para evaluar y optimizar el diseño de las áreas de navegación. Los modelos matemáticos que incorporan el pilotaje del barco en la simulación, se denominan sistemas de simulación en tiempo acelerado, al utilizarlos se elimina la intervención humana para el control de un barco durante la simulación, no obstante, se pueden incluir algunos aspectos náuticos durante la simulación de las maniobras mediante el aporte de información de los pilotos o capitanes, las principales ventajas de estos sistemas es que son de ejecución rápida, y con ellos es posible realizar una comparación objetiva de escenarios, estos sistemas permiten evaluar de forma preliminar los espacios de maniobra. Actualmente, el puerto de Manzanillo es importante en el desarrollo portuario del país, y para ello es necesario conocer el comportamiento de las maniobras de las embarcaciones en dicho puerto, con este fin se elaboraron bases de datos, donde se incluye información batimétrica, las condiciones oceanográficas y meteorológicas (viento, oleaje y corrientes).
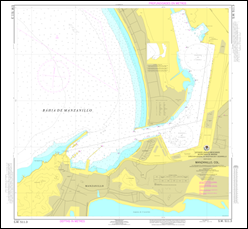
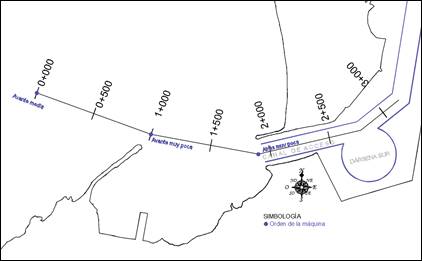
METODOLOGÍA PARA LA OBTENCIÓN DE LA INFORMACIÓN Para ejecutar las simulaciones, primero se delimitó la localización geográfica y el área que se integró; esto puede realizarse con el uso de portulanos, mapas y planos para lograr definir el área que se integró en la base de datos. La extensión del área a definir debe incluir preferentemente el área de pilotaje, la información antes mencionada se muestra en la figura 1.
Figura 1 a) Carta náutica, b) Disposición de las áreas de aguas.
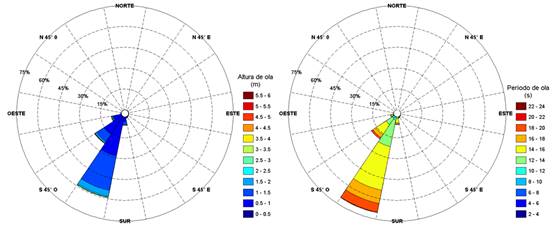
En lo que respecta al oleaje del puerto de Manzanillo, se tomó de la información de la Red Nacional de Estaciones Oceanográficas y Meteorológicas (RENEOM) del Instituto Mexicano del Transporte (IMT). Para este puerto las direcciones que predominan en la zona son: Sur, S22.5°O, S45°O, S67.5°O y Oeste con un 98.50% del total de los registros obtenidos, lo anterior está representado en la figura 2.
Figura 2 Distribución de alturas y períodos de oleaje – régimen anual, Manzanillo.
En la tabla 1, se muestra los valores de altura de ola media y período medio resultado de la caracterización del oleaje normal.
Tabla 1 Altura, período y dirección de oleaje.
En el caso del oleaje que se propaga al interior del puerto y de las corrientes litorales, estas se analizaron a través de modelos numéricos con el software Mike 21 SW (Spectral Wave) y de MIKE 21 FM (Flow Model) del Danish Hydraulic Institute (DHI), de los cuales se obtuvieron los resultados de la propagación de oleaje y de corriente litoral. En las figuras 3 y 4, solamente se presentan los resultados más representativos.
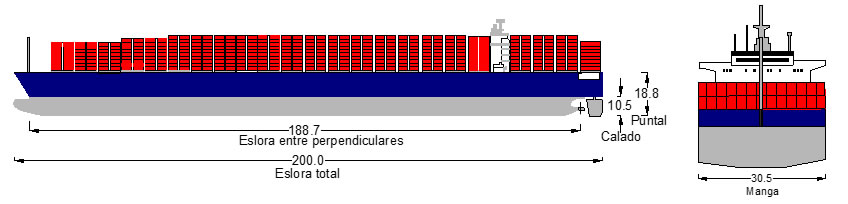
En el caso del viento, se tomó la información de los registros obtenidos de la Estación Meteorológica Automatizada (EMA), en el puerto de Manzanillo, el cual existe una tendencia de incidencia de los vientos de los cuadrantes al Norte (del sector Norte al sector N 45° E) con un 30.95 % de frecuencia y de los cuadrantes al Oeste (del sector S 67.5° E al sector Oeste) con un 32.92% de frecuencia. Las mayores velocidades de viento se registraron en los sectores Norte, S 67.5° E, S 67.5° O, N 67.5° O, N 45° O. En la tabla 2 se presentan los resultados de la magnitud del viento – dirección, en su régimen anual. El modelo de embarcación que se utilizó en las simulaciones corresponde a un barco PANAMAX portacontenedor (ver figura 5). Las características de dicha embarcación se muestran en la tabla 3.
Tabla 2 Resultados de la magnitud del viento-dirección, régimen anual.
Figura 5 Dimensiones generales del modelo de la embarcación.
Tabla 3 Dimensiones de la embarcación
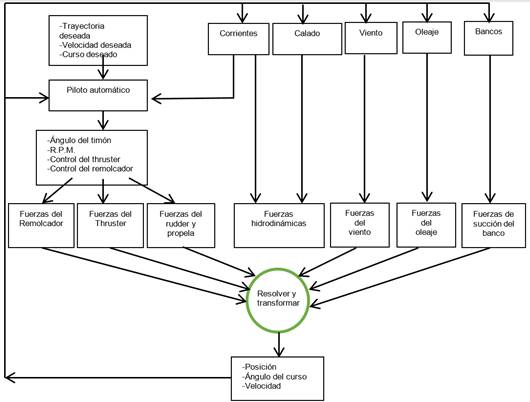
ANÁLISIS EN MODELO NÚMERICO El modelo numérico de maniobrabilidad que se utilizó fue el Ship Manoeuvring (SHIPMA), consiste en un conjunto de ecuaciones que constituyen una relación entre la posición y las velocidades del barco en dos puntos posteriores en el tiempo. El ángulo del timón y las revoluciones por minuto (RPM) de la hélice o propela son parte importante en estas ecuaciones. Lo anterior implica que la maniobrabilidad, se desarrolla como una serie de estados del sistema al siguiente paso de tiempo (en este caso la posición, el rumbo y velocidades del barco). Cuanto más pequeño sea el intervalo de tiempo entre dos pasos de tiempo, más se asemeja el modelo al sistema real (continuo). En el caso de las simulaciones realizadas el paso de tiempo que se seleccionó fue de 1 segundo. El diagrama del modelo numérico que utiliza esta herramienta es el que se muestra en la figura 6, toma en consideración la configuración del puerto, áreas de navegación, sus profundidades, características específicas del buque, la acción de los remolcadores, las condiciones de oleaje, el viento y las corrientes, entre otras.
Figura 6 Diagrama del modelo numérico de maniobras del software SHIPMA.
RESULTADOS DE LA APLICACIÓN DEL MODELO DE MANIOBRABILIDAD La maniobra que se realizó fue una parada forzada (marcha atrás), para lo cual se definió una trayectoria inicial (ver figura 7), que el autopilotaje del algoritmo del modelo SHIPMA intentará seguir, con la trayectoria ordenada a la máquina, se puede controlar la velocidad de giro de la propela (RPM) o la velocidad de la embarcación (nudos). La estrategia consistió en que la embarcación se aproxima al puerto con el rumbo definido por la trayectoria inicial, la embarcación navega hasta llegar al morro del rompeolas oeste en el cadenamiento 1+000 donde se inicia el frenado de la embarcación (30 RPM), la embarcación avanza 900 m y nuevamente se cambia la orden (-30 RPM) en el cadenamiento 1+900, en este momento la propela de la embarcación empieza detenerse totalmente y empieza a girar en sentido contrario para dar marcha atrás, la maniobra termina cuando la embarcación se detiene.
Figura 7 Trayectoria inicial y ordenes de la máquina.
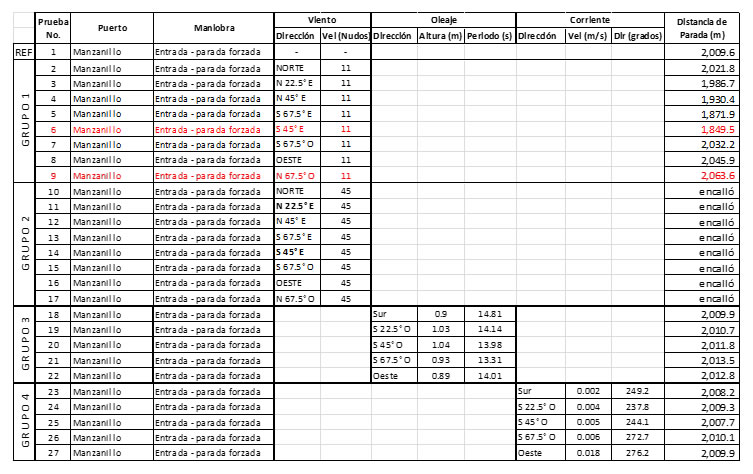
Para determinar la distancia de parada que recorrió la embarcación bajo diferentes condiciones, se elaboró la matriz de pruebas que se muestra en la tabla 4, se consideró de forma independiente la acción del viento, la acción del oleaje y la acción de las corrientes.
Tabla 4 Matriz de escenarios simulados para determinar la distancia de parada de la embarcación.
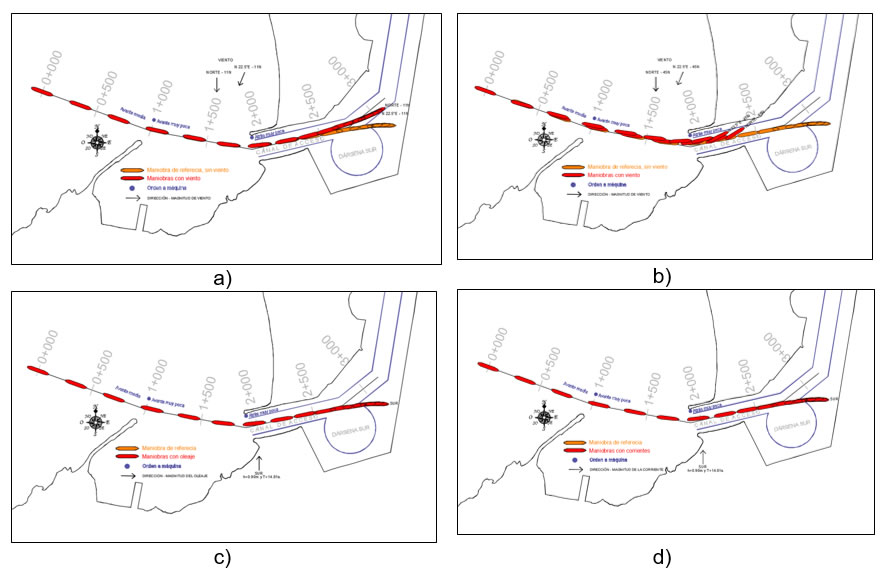
Los resultados que se obtuvieron se presentan en la figura 8, se muestra el comportamiento de la maniobra con viento de 10 y de 35 nudos, además, en la misma figura, se muestra el comportamiento de la maniobra con el oleaje y las corrientes.
Figura 8 a) Resultados de la trayectoria con velocidad de viento a 10 nudos, b) Trayectoria velocidad de viento a 35 nudos, c) Trayectoria con oleaje, d) Trayectoria con corrientes.
CONCLUSIONES Y RECOMENDACIONES Para el desarrollo de la base de datos del modelo numérico de maniobrabilidad, se debe incluir la información de la batimetría, los límites de las áreas de navegación, límites de muelles y posición de los señalamientos marítimos, para realizar el procesamiento con la mayor calidad posible. El efecto de las condiciones oceanográficas y meteorológicas que tuvo más influencia durante las pruebas simulando la maniobra, fue el viento. Mientras que el efecto del oleaje se analizó en condiciones medias normales en el régimen anual, sin embargo, se recomienda ampliar el estudio con el efecto del oleaje considerando el periodo de balanceo natural del barco, debido a que puede producir efectos de resonancia. También se debe de ampliar en el estudio el efecto del oleaje bajo una amplia gama de diferentes periodos. Para el puerto de Manzanillo se presentó un periodo de oleaje de hasta 25 s. En relación a las simulaciones de la maniobra de parada, es evidente que el timón pierde eficiencia para controlar la trayectoria de la embarcación cuando la propela da marcha atrás, por lo que al realizar una maniobra de este tipo involucra un grado de riesgo. En los estudios de maniobras las órdenes a la máquina deben de ser establecidas con base a un conocimiento náutico, debido a que esto está relacionado directamente con la velocidad de la embarcación y su comportamiento. La distancia recorrida de la embarcación para una maniobra de parada forzada con las condiciones del puerto de Manzanillo fue de 2063 m, este resultado fue con las condiciones de viento de 11 nudos y con dirección S 45° E.
REFERENCIAS BIBLIOGRÁFICAS 1. ROM 3.1-99 (2000). Proyecto de la configuración marítima de los puertos; canales de acceso y áreas de flotación, Obras Marítimas Tecnología, Puertos del Estado. España. 2. PIANC (2014). Harbour approach channels design guidelines. Report No. 121-2014. USA. 3. Marin Deltares (2002). SHIPMA, a fast-time simulation program for ship manoeuvring. Netherlands.
MENDOZA Manuel CASAS Cindy ESTRADA Juan Ramón |