|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Introducción En el complejo escenario del comercio global y ante la consolidación de la relocalización de cadenas de suministro (nearshoring), la eficiencia de los nodos logísticos, tales como, puertos marítimos, terminales intermodales y cruces fronterizos, son el motor indispensable que impulsa la competitividad económica de las naciones. De acuerdo con el Índice de Rendimiento de los Puertos de Contenedores (CPPI) y los informes de competitividad logística publicados por el Banco Mundial y la CEPAL, los mayores cuellos de botella en las cadenas de suministro globales ocurren precisamente en los puntos de transferencia intermodal, donde la falta de digitalización y la saturación de los accesos terrestres frenan el movimiento físico de mercancías. En estas evaluaciones de infraestructura portuaria y fronteriza, los principales nodos de México (como Manzanillo, Lázaro Cárdenas y Veracruz) han enfrentado severos retos operativos, ubicándose persistentemente rezagados frente a terminales globales altamente automatizadas debido a las demoras excesivas en las aduanas y la gestión del transporte de última milla. A nivel nacional, este rezago estructural se traduce en una severa saturación en los accesos terrestres a los principales centros de carga del país. El constante incremento de volúmenes de mercancías transportadas por vía terrestre ha sobrepasado la capacidad geométrica de la infraestructura física actual, provocando filas kilométricas que paralizan arterias urbanas clave. Datos actualizados por el IMCO (Instituto Mexicano para la Competitividad) y reportes de organismos empresariales indican que el costo social y económico de la congestión vehicular en las 32 principales ciudades de México asciende a más de 94,000 millones de pesos anuales, concentrándose la mitad de este impacto en la Zona Metropolitana del Valle de México. En promedio, esto representa una pérdida de 113 horas al año por persona en tiempos de traslado. En el entorno logístico, esta ineficiencia provoca severos retrasos operativos, sobrecostos de distribución y un alarmante impacto ambiental debido a las emisiones de gases de efecto invernadero de los motores diésel en ralentí prolongado. Para responder a la apremiante necesidad de modelar, predecir el comportamiento de las filas de espera en las terminales y emitir recomendaciones automatizadas que optimicen las ventanas operativas, el Instituto Mexicano del Transporte (IMT), bajo la Coordinación de Transporte Integrado y Logística, ha desarrollado el Laboratorio de Visión Artificial del Transporte (LabVAT). Esta iniciativa tecnológica de vanguardia aprovecha las capacidades de la visión computacional y el aprendizaje profundo no solo para mitigar la congestión vial de forma reactiva, sino para sentar las bases científicas hacia una infraestructura de transporte mexicana inteligente, resiliente y digitalizada. El LabVAT ofrece una solución disruptiva para la gestión inteligente de carga y movilidad en entornos urbanos y portuarios. Mediante un ecosistema digital integrado, el laboratorio procesa flujos de video en tiempo real e implementa algoritmos de inteligencia artificial para predecir picos de saturación, diseñar itinerarios de distribución dinámicos y sugerir la asignación óptima de viajes. Al cruzar datos masivos sobre la capacidad operativa de los recintos intermodales con las condiciones del tráfico citadino, esta tecnología maximiza la productividad de las flotas de transporte y al mismo tiempo fomenta una movilidad urbana más sostenible, reduciendo significativamente la huella de carbono asociada al comercio nacional. 1. ¿Qué es el LabVAT? El Laboratorio de Visión Artificial del Transporte (LabVAT) no es solo un espacio de investigación; es una plataforma de vanguardia donde la inteligencia artificial y las arquitecturas de software avanzado convergen para crear las soluciones de movilidad del futuro. El laboratorio se especializa en la integración de redes neuronales y algoritmos de vanguardia (como YOLO y redes LSTM) para el análisis en tiempo real de flujos de transporte, transformando datos masivos en herramientas de diagnóstico, seguridad y planeación estratégica para la infraestructura del transporte.
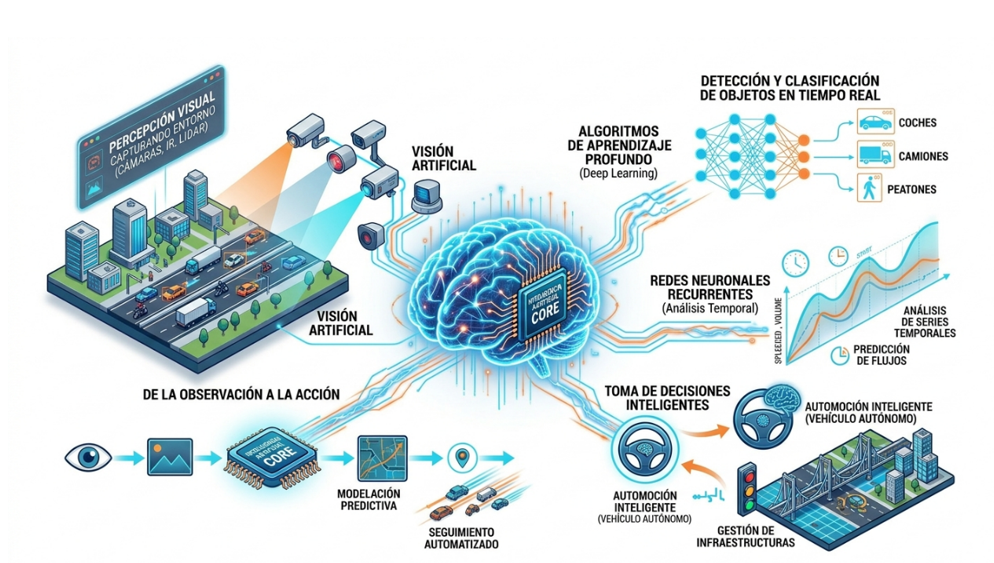
1.1 ¿Cómo funciona el "CORE" del LabVAT? El CORE de este laboratorio es la Visión Artificial, tecnología que busca emular una de las capacidades más complejas del ser humano, la percepción visual. A través de sensores avanzados como cámaras de video, dispositivos infrarrojos y sensores de gama, el sistema es capaz de observar su entorno, procesar la información y tomar decisiones inteligentes en tiempo real, tal como lo haría el cerebro humano frente al volante o en la gestión de infraestructuras. Este procesamiento no se limita a la captura de imágenes; implica la implementación de algoritmos de aprendizaje profundo (Deep Learning) para la detección y clasificación de objetos en tiempo real, combinados con redes neuronales recurrentes para el análisis de series temporales. De este modo, el sistema transita de la simple observación pasiva a la modelación predictiva y el seguimiento automatizado de flujos vehiculares y logísticos.
Figura 1. Ecosistema de Movilidad Autónoma LabVAT Fuente: Elaboración propia (2026). Imagen generada por IA.
1.2 Un ecosistema tecnológico integrado Aunque la visión artificial es su eje central, el LabVAT se nutre de otras herramientas poderosas para ofrecer soluciones integrales:
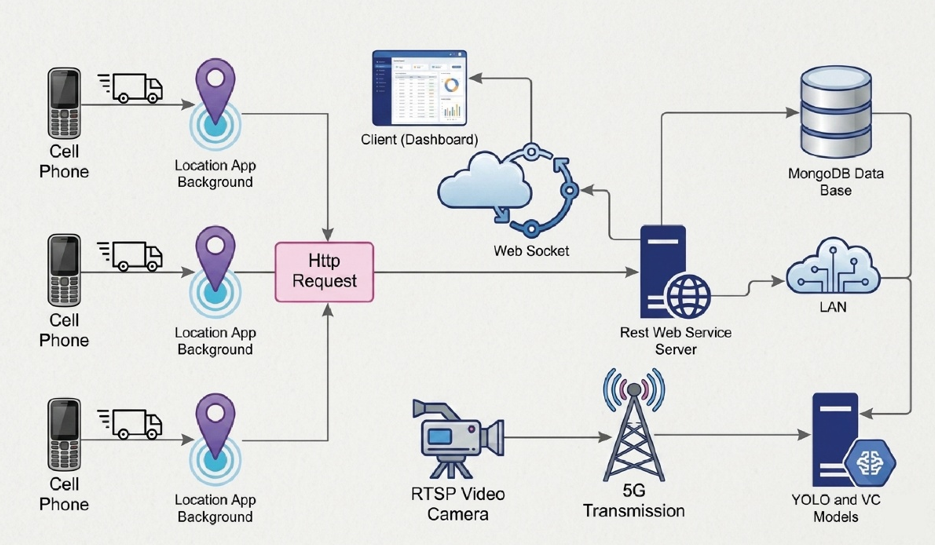
2. Arquitectura y componentes funcionales del sistema LabVAT La ingeniería modular del LabVAT permite superar las limitaciones de los sistemas rígidos, funcionando como un conjunto de soluciones adaptables. Así, una innovación desarrollada para el ámbito portuario puede implementarse rápidamente en terminales terrestres o fronterizas. Esta arquitectura representa el ecosistema de datos del LabVAT, diseñado para la gestión y análisis de vehículos en tiempo real. Se puede dividir en tres capas principales:
2.1 Captura de Datos de Campo El sistema inicia con dos fuentes de entrada fundamentales:
2.2 Procesamiento y Análisis (Backend) El núcleo de la arquitectura se compone de:
2.3 Visualización y Comunicación Para la interacción con el usuario final y la sincronización de datos:
Esta estructura modular permite al LabVAT integrar tanto la telemetría GPS tradicional como el análisis avanzado de video en una única plataforma de monitoreo inteligente.
Figura 2. Arquitectura del LabVAT Fuente: Elaboración propia
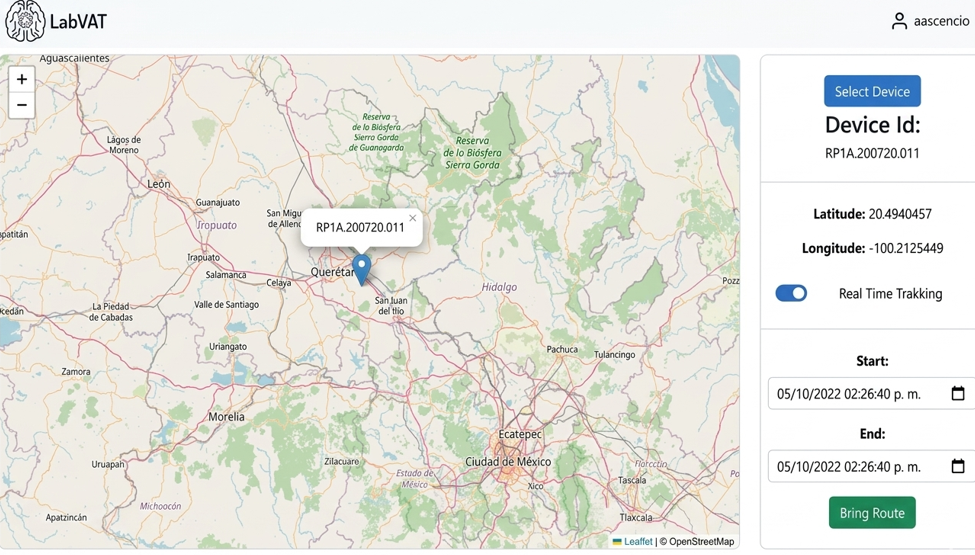
Este sistema no es una herramienta estática, sino un engranaje de cuatro módulos estratégicos diseñados para transformar la gestión del transporte: 2.4 Geolocalización Inteligente La capacidad de monitorear vehículos en tiempo real es el primer paso hacia la optimización. A través de una interfaz móvil avanzada, el LabVAT rastrea las unidades asignadas a las terminales intermodales. Esta herramienta no solo registra coordenadas geográficas (Latitud y Longitud), sino que gestiona parámetros críticos como:
Figura 3. Interfaz de usuario del módulo de geolocalización LabVAT Fuente: Elaboración propia
2.5 Datos en Tiempo Real Para que un sistema sea "inteligente", debe ser capaz de comunicarse de forma instantánea. El éxito operativo del LabVAT radica en su robusta infraestructura tecnológica:
Figura 4. Monitoreo en tiempo real y generación de rutas Fuente: Elaboración propia
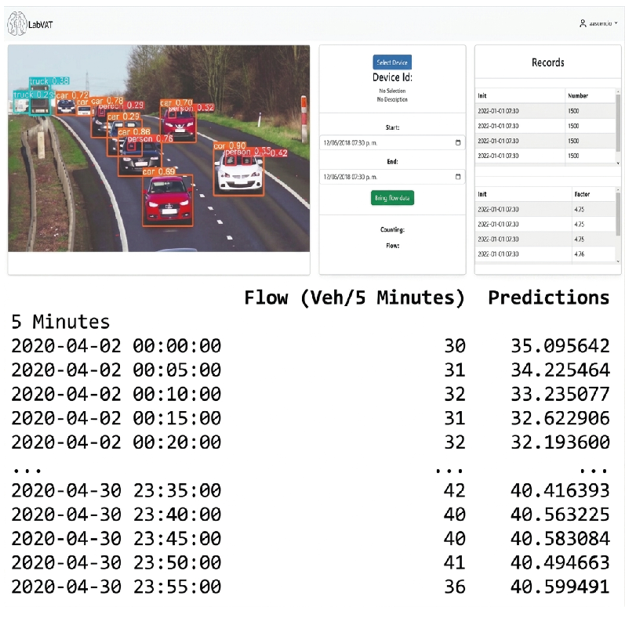
2.6 Predicción de Tráfico Uno de los logros más destacados del laboratorio es su capacidad predictiva. Utilizando Redes Neuronales de Memoria a Largo y Corto Plazo (LSTM), el sistema analiza patrones históricos para proyectar condiciones viales futuras.
Figura 5. Modelo predictivo de flujo vehicular en LabVAT Fuente: Elaboración propia
2.7 Asignación Automática de Viajes Este módulo utiliza un algoritmo metaheurístico conocido como Recocido Simulado (Simulated Annealing o SA). Su misión es resolver el rompecabezas logístico: decidir el momento exacto en que un vehículo debe partir de su origen para encontrar una terminal con capacidad de atención disponible.
3. Cronología del LabVAT La madurez tecnológica del LabVAT es el resultado de años de desarrollo incremental: Tabla 1. Línea de Tiempo LabVAT
4. Resultados y beneficios clave El impacto del sistema LabVAT se traduce en ventajas competitivas distribuidas entre los diversos actores del ecosistema logístico:
5. Hacia el Futuro El horizonte del LabVAT no se limita a proyectos aislados. Gracias a su reconocimiento internacional por parte de organismos como el Foro de Cooperación Económica Asia-Pacífico (APEC), el laboratorio se posiciona como el estándar para la futura Red Nacional de Inteligencia Carretera. La meta es clara: convertir las vías federales de México en arterias inteligentes donde la tecnología y la infraestructura pública trabajen en armonía para asegurar una movilidad más ágil, segura y, sobre todo, competitiva a nivel mundial. Conclusiones
El LabVAT no solo resuelve un problema de tráfico; redefine la interacción entre la tecnología y la infraestructura pública, asegurando que el futuro de la logística en México sea más inteligente, eficiente y respetuoso con el medio ambiente. Glosario Tabla 2. Glosario de Tecnologías y Conceptos Utilizados en LabVAT
Referencias: Abhinu, C. G., Kiran, K., Aswin, P., & Bonymol, B. (2021). Multiple Object Tracking using Deep Learning with YOLO V5. International Journal of Engineering Research & Technology, 9(13), 47–51. Ascencio, A., Bustos, A., & Acha, J. (2017). Laboratorio digital de imágenes para medir flujos de vehículos en terminales intermodales de carga y vialidades. https://imt.mx/archivos/Publicaciones/PublicacionTecnica/pt493.pdf Instituto Mexicano para la Competitividad A.C. [IMCO] y SinTráfico. (2018). 3er Estudio Nacional del Costo de la Congestión 2018: ¿Cuánto cuesta la congestión vehicular en México? https://imco.org.mx/ World Bank. (2024). The Container Port Performance Index 2023: A Informative Global Benchmark to Improve Supply Chain Resilience and Efficiency. https://www.worldbank.org/en/topic/transport/publication/cppi-2024 Braham, M., & Droogenbroeck, M. Van. (2016). Deep background subtraction with scene-specific convolutional neural networks. IEEE Xplore, 1–4. doi: 10.1109/IWSSIP.2016.7502717 Cal y Mayor, R., & James, Cárdenas. (2007). Ingeniería de Tránsito Fundamentos y Aplicaciones. (Alfaomega, Ed.; 8th ed.). Elgendy, M. (2020). Deep Learning for Vision Systems (Manning Publications). Guíadev. (2018). MySQL vs MongoDB. Bases de Datos. https://guiadev.com/mysql-vs-mongodb/ Hajj, D. (2022). Qué es Telcel 5G. Llegada de La Red 5G de Telcel a México. https://www.telcel.com/personas/telefonia/la-red-de-mayorcobertura/red-tecnologia/5g Hasibuan, N. N., Zarlis, M., & Efendi, S. (2021). Detection and tracking different type of cars with YOLO model combination and deep sort algorithm based on computer vision of traffic controlling. Jurnal Dan Penelitian Teknik Informatika, 6(1). DOI : https://doi.org/10.33395/sinkron.v6i1.11231 Minematsu, T., Shimada, A., Uchiyama, H., & Taniguchi, R. (2018). Analytics of Deep Neural Network-Based Background Subtraction. Journal of Imaging, 4(78). doi:10.3390/jimaging4060078 Python.org. (2022). Creación de entornos virtuales con venv. Venv Documentación Oficial. https://docs.python.org/es/3/library/venv.html Song, H., Liang, H., Li, H., Dai, Z., & Yun, X. (2019). Vision-based vehicle detection and counting system using deep learning in highway scenes. European Transport Research Review, 11(51). https://doi.org/10.1186/s12544-019-0390-4 Supeshala, C. (2020). YOLO v4 or YOLO v5 or PP-YOLO? Towards Data Science. https://towardsdatascience.com/yolo-v4-or-yolo-v5-or-ppyolo-dad8e40f7109 Wojke, N., Bewley, A., & Paulus, D. (2017). SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC. Computer Vision and Pattern Recognition. https://doi.org/10.48550/arXiv.1703.07402
ZAMORA Alma Rosa
ASCENCIO José Alejandro
BUSTOS Agustín
PÉREZ Carlos Mario
MONTES Eduardo
“Las opiniones expresadas en esta publicación son de los autores y no necesariamente reflejan los puntos de vista del Instituto Mexicano del Transporte” |