|
|||||||||||||||||||||||||||||||||||||
1. IntroducciónActualmente, los modelos de flujo de tránsito vehicular son creados a través de softwares de simulación digital avanzada para conocer el comportamiento de los vehículos y usuarios de las vialidades. Los modelos de flujo de tránsito vehicular tienen la finalidad de recrear con exactitud el tránsito observado y medido en la vía. Pueden aplicarse para planificar y gestionar el tránsito dentro de una determinada red de carreteras. De acuerdo con García y Romero (2020) la simulación digital es una técnica que nos permite imitar (o simular) en un ordenador el comportamiento de un sistema físico o teórico, de acuerdo con ciertas condiciones particulares de operación. Asimismo, mediante la simulación se recogen datos de funcionamiento del sistema, lo que posibilita estimar las medidas de desempeño de dicho sistema. En la medida que se obtengan resultados de los modelos de simulación, se podrá reproducir el comportamiento del sistema en la realidad y mejorar los aspectos relativos a la seguridad vial en carreteras y niveles de servicio ofrecidos por parte de la infraestructura hacia sus usuarios. Por ello, los modelos de simulación de flujo de tránsito se han convertido en una herramienta esencial para el análisis y la experimentación. 2. Estado del arte de la simulación del tránsito vehicular2.1. Clasificación de los modelos de simulación de tránsito vehicularEs importante distinguir entre los tipos de modelos de simulación digital que pueden ser categorizados considerando varios criterios tales como el nivel de detalle, su operacionalización y representación de los procesos (Hoogendoorn y Bovy, 2001), por mencionar algunos. Aunque, la clasificación para los modelos de simulación de flujo de tránsito, comúnmente más utilizada, se refiere al nivel de detalle, distinguiendo, tres principales enfoques: el microscópico, el mesoscópico y el macroscópico, los cuales se detallan continuación: · Microscópico: Modelos con gran descripción del nivel de detalle donde entidades individuales son identificadas y trazadas. · Mesoscópico: Modelos con una descripción de detalle de nivel medio. · Macroscópico: Modelos con descripción de detalle bajo. Un modelo de simulación microscópica describe el comportamiento del espacio y el tiempo de las entidades que conforman el sistema, es decir, vehículos y conductores, así como sus interacciones a un alto nivel de detalle (individualmente). Por ejemplo, para cada vehículo del flujo, un cambio de carril se describe como una cadena detallada de decisiones de los conductores (Hoogendoorn y Bovy, 2001). En resumen, un modelo de tránsito microscópico describe el comportamiento de conductores y vehículos de forma individual. Un modelo mesoscópico no distingue ni rastrea vehículos individuales, sino que especifica el comportamiento de individuos en términos probabilísticos. Para ello, el tránsito vehicular se representa mediante (pequeños) grupos de entidades de tránsito, cuyas actividades e interacciones se describen con un bajo nivel de detalle. Por ejemplo, una maniobra de cambio de carril podría representarse para un vehículo individual como un acontecimiento instantáneo, en el que la decisión de realizar un cambio de carril se basa en las densidades relativas de los carriles y en los diferenciales de velocidad (Hoogendoorn y Bovy, 2001, pp. 283-303). Atiencia y Ramírez (2013) también mencionan que en los modelos mesoscópicos se estudian los autos por grupos, se clasifican de acuerdo con sus velocidades y se obtienen tipos de autos que se pueden estudiar de manera individual. Hoogendoorn y Bovy (2001) brindan la definición de los modelos de simulación macroscópica como aquellos que: describen el tránsito a un nivel alto de agregación como un flujo sin distinguir sus partes constituyentes. Por ejemplo, el flujo del tránsito se representa de forma agregada utilizando características como la tasa de flujo vehicular, la densidad y la velocidad. Las maniobras individuales de los vehículos, como un cambio de carril, no suelen representarse explícitamente. Un modelo macroscópico puede suponer que el flujo del tránsito está correctamente asignado a los carriles de la calzada y emplear una aproximación a tal fin (pp. 283-303). Los modelos macroscópicos, a su vez, asumen que el comportamiento de los conductores depende de las condiciones del tránsito vehicular y estudian el comportamiento de los vehículos a gran escala. El conjunto más grande es el macroscópico, ya que, en él se encuentran contenidos los demás modelos. (Atiencia y Ramírez, 2013, p. 16) Adicionalmente a estas tres principales categorías en que se dividen los modelos de simulación, se pueden identificar los modelos híbridos, los cuales, se caracterizan por combinar los modelos microscópicos, mesoscópicos y macroscópicos de diversas maneras para aprovechar sus propiedades complementarias (Sanghyun et al., 2022). 2.2. Software utilizado para simulaciones de flujos de tránsitoLos softwares de simulación son de gran utilidad en la investigación del transporte, sobre todo, para visualizar la etapa de operación de proyectos carreteros, aunque no solo se limita a ello, sino que también se pueden realizar evaluaciones a nivel anteproyecto y proyecto ejecutivo. Su uso es aplicado, mayormente, para proyectos de vías terrestres, tales como desarrollos carreteros y ferroviarios. Los principales problemas que se resuelven utilizando estos softwares, son el modelado del flujo vehicular, la identificación de congestionamientos, tiempos de demora en vialidades y parámetros asociados al tránsito vehicular, así como el diseño de las vías para la mejora de la seguridad vial. Además, proporcionan indicadores como la velocidad promedio de recorrido, el tiempo de espera y son altamente utilizados para estimar el comportamiento futuro de la operación de las vías terrestres y de la interacción con sus usuarios. Existen diversos programas informáticos de simulación, tanto comerciales como de acceso libre, que pueden ser utilizados por académicos o responsables de la toma de decisiones para analizar problemas relacionados con el transporte. Dado que los softwares se basan en diferentes teorías y supuestos relacionados con la modelación del tránsito, cada uno de estos programas informáticos tiene sus propias ventajas y diferencias. A continuación, se describen algunas de las principales características de los softwares comerciales y de acceso libre más utilizados para realizar modelos de simulación de flujo vehicular en vías terrestres. 2.2.1. Software comercialEste tipo de software tiene la principal característica de que se necesita comprar una licencia para poder ser utilizado, lo cual, aumenta el costo inicial de un proyecto. Entre los distintos tipos de softwares comercial o programas patentados más utilizados en simulación destacan los siguientes:
Algunas de las principales características distintivas de cada uno de los dos softwares comerciales, frecuentemente utilizados en la simulación del tránsito vehicular se describen en lo subsecuente: Aimsun modela cada conducta de forma continua durante el período de simulación de acuerdo con varios modelos de comportamiento del conductor, como el seguimiento del vehículo, el cambio de carril y la aceptación de espacios. El modelo ofrece capacidades muy detalladas de modelación de la red de tránsito ya que puede distinguir entre diferentes tipos de vehículos, además puede modelar demandas de tránsito vehicular basadas en flujos y proporciones de giro o matrices origen destino (OD) y modelos de selección de rutas. También puede lidiar con un amplio rango de tipos de calzada en sistemas de vialidades del tipo arterial o autopista. Asimismo, cuenta con la capacidad para realizar el modelado y análisis del impacto de incidentes y paneles de mensajes variables (PMV). (Ejército et al., 2017, pp. 1-4). Aimsun puede replicar cualquier tipo de detector de tránsito vehicular con la finalidad de recolectar los datos de mediciones básicas como los conteos de vehículos, ocupación, presencia, velocidad y densidad a cualquier nivel de agregación definido por los usuarios (Ejército et al., 2017). Por otra parte, PTV Vissim es un modelo de simulación por pasos temporales y basado en el comportamiento desarrollado para modelar el tránsito urbano y las operaciones de transporte público (Ejército et al., 2017). El modelo consta internamente de dos componentes que se comunican a través de una interfaz. El primero es un simulador de tránsito, que es un modelo microscópico de flujo de tránsito que simula el movimiento de vehículos y genera la salida correspondiente. El segundo componente, denominado generador del estado de la señal, actualiza el estado de la señal para el siguiente paso de la simulación. El modelo es capaz de producir medidas de eficacia comúnmente utilizadas en la profesión de la ingeniería de tránsito como el retraso total y el retraso en tiempo de parada (Ejército et al., 2017). En lo referente a la interfaz gráfica de usuario, entre Aimsun y PTV Vissim, PTV Vissim tiene la mejor representación gráfica. Cuenta con vehículos más realistas, peatones, e inclusive, edificios estáticos de las ciudades. El usuario puede generar una vista de 360° de la red creada mientras la simulación está corriendo, lo cual, ayuda claramente a examinar el patrón del tránsito vehicular (Ejército et al., 2017). En resumen, ambos simuladores son capaces de incorporar la mayoría de las características estándar utilizadas en la modelación del tránsito vehicular y su precisión en el modelado de redes de tránsito complejas es muy similar (Ejército et al., 2017). 2.2.2. Software de acceso libreEl software de simulación del tránsito vehicular de acceso abierto y uso libre otorga a los usuarios el derecho de utilizarlo sin ningún cargo monetario y cada vez es más frecuente su demanda. Por lo anterior, los proyectos realizados con este tipo de software se están volviendo más populares ya que brindan a los usuarios el derecho a usar, estudiar y modificar el programa informático sin ninguna restricción (Kotusevski y Hawick, 2009). A continuación, se analizan dos simuladores de acceso abierto que se utilizan en el modelado del tránsito vehicular y se denotan sus principales características. · MATsim – Versión 15.0: Multi-Agent Transport Simulation MATSim es un marco de código abierto para implementar simulaciones de transporte basadas en agentes a gran escala (MATSim, 2024). La actualización más reciente del software corresponde a la versión 15.0 “Primavera de 2023”, lanzada en abril de 2023. El código fuente Java de MATSim puede descargarse y dispone de módulos que pueden sustituirse por implementaciones propias para probar distintos aspectos de su propia simulación. MATSim funciona en los principales sistemas operativos, como Windows, Unix/Linux, entre otros. También ofrece la posibilidad de ampliar el software utilizando sus propios algoritmos. · SUMO – Versión 1.19.0: SUMO es, puramente, un simulador de tránsito microscópico. Cada vehículo está dado explícitamente y definido, al menos, por un identificador (nombre), la hora de salida y la ruta del vehículo a través de la red (Behrisch et al., 2011). De manera similar a MATSim, el código fuente de SUMO está disponible para su descarga en línea. SUMO empezó a implementarse en 2001, pero fue hasta 2002 cuando se lanzó la primera versión de código abierto (Behrisch et al., 2011). La última actualización del software corresponde a la versión 1.20.0 lanzada el 05 de julio 2024. 2.3. Comparativa de los softwaresUna vez realizada la descripción general de algunos de los softwares de simulación del tránsito vehicular comerciales y de acceso abierto más utilizados, en la Tabla 1 se aprecia la comparativa de estos cuatros softwares mencionados, con respecto a tres funciones principales a modelar para calles y carreteras en operación, para contar con información más detallada que ayude a una selección más adecuada del software a elegir.
Tabla 1. Comparativa de los softwares de simulación
Para ver más detalles de las características distintivas de los softwares empleados en micro simulación, consultar la publicación técnica no. 821 denominada “Criterios de modernización carretera basados en la evolución del nivel de servicio de la RCF” publicada por el Instituto Mexicano del Transporte. 3. Metodología empleada en simulación de flujos de tránsitoLa metodología empleada para realizar simulaciones de flujos de tránsito en carreteras es muy similar en cada uno de los softwares abordados anteriormente y se resume en el siguiente esquema.
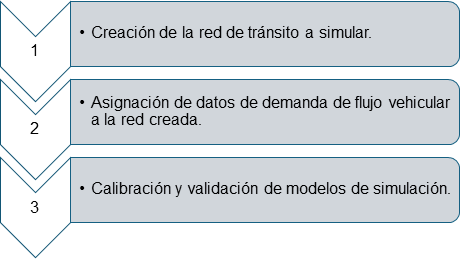
Figura 1. Esquema general de la metodología a seguir para realizar escenarios de simulación.
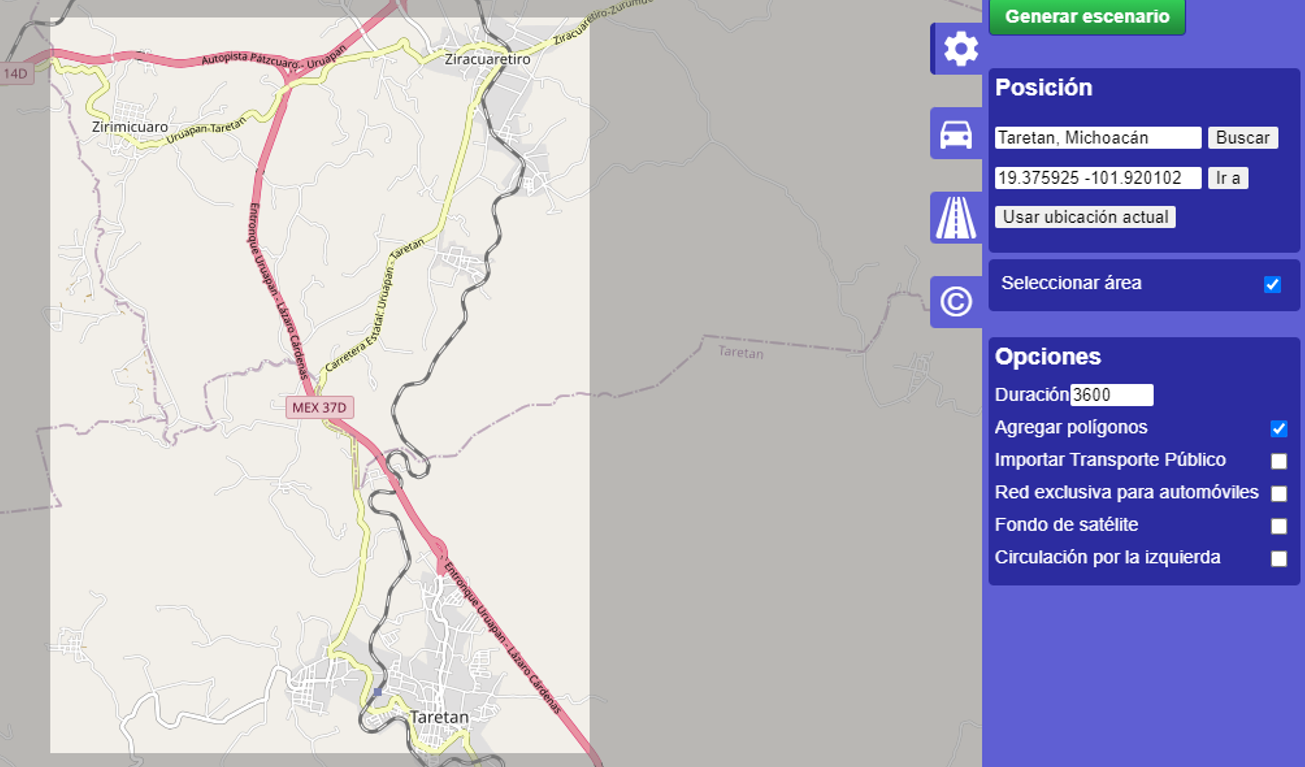
3.1. Descripción de las etapas de la simulación de flujos vehiculares en redes de carreterasA continuación, se describen las tres etapas de la metodología observada en la Figura 1. 3.1.1. Creación de la red de tránsito a simularExisten diversas formas de dibujar y crear la red vial a simular. A continuación, se describen las alternativas que se pueden utilizar: 1) De forma manual a través del trazado de la red directamente en el software utilizando, únicamente, sus herramientas de edición. 2) Importar redes creadas en otras aplicaciones de simulación del tránsito o software de diseño asistido por computadora (CAD). 3) Imprimir y colocar una imagen de fondo obtenida de Google Earth u otro sistema de mapas, escalarla y dibujar la red sobre esa imagen con las herramientas de edición de red con que cuenta cada software. Esta opción resulta complicada y lleva mayor tiempo por la falta de simplicidad de las herramientas de dibujo con que cuentan los softwares de simulación. 4) Descargar la red del sistema de mapas denominado Open Street Map (OSM) de acceso y descarga gratuita. Si se selecciona esta opción se debe tener en cuenta que, en ocasiones, es necesario editar la red vial descargada por no ser del todo correcta. La edición se hace con las herramientas de diseño propias de cada software. En la Figura 2 se ilustra la interfaz para descarga de redes de OSM.
Figura 2. Selección del área específica para descarga de la red de un tramo carretero a simular desde OSM. Fuente: (OSM, 2024). 3.1.2. Asignación de datos de demandaLa demanda del tránsito puede ser definida dentro de cada software como cantidad de viajes individuales, flujos o como rutas (Alvarez et al., 2018). A continuación, se describen cada una de las opciones, comúnmente, utilizadas para la asignación de demanda: · Cantidad de viajes individuales Generalmente esta modalidad de ingresar la demanda se realiza por medio de matrices origen – destino (O-D). Las matrices origen – destino son utilizadas en escenarios de gran escala que involucran redes de tránsito grandes y complejas. Las matrices describen el movimiento de vehículos entre diversas zonas de asignación del tránsito en cantidad de vehículos por unidad de tiempo (Behrisch et al., 2011). Las matrices O-D pueden ser importadas al software utilizado si son generadas en otros programas informáticos o descargadas de redes de mapas tales como OSM, que cuenta con la opción de descarga de demanda en cantidades de viajes individuales por tipo de vehículo. · Flujos Está opción consiste en la asignación de demanda a través de una tasa de flujo vehicular proporcionada en vehículos por hora para cada tipo de vehículo creado. La asignación se complementa indicando el segmento o tramo de la red donde se origina la ruta y aquél donde termina, creando así una ruta de forma manual para cada tipo de vehículo. Se recomienda utilizar esta opción con redes pequeñas o de menor escala. Los flujos de tránsito horario pueden ser determinados de dos maneras: - Realizar aforos en sitio por tipo de vehículo durante las horas de máxima demanda para establecer el volumen horario de máxima demanda (VHMD) y, a partir de ello, obtener los datos necesarios para ingresarlos al software. - Obtener los flujos horarios máximos por tipo de vehículo, de manera indirecta, a partir de estaciones de conteo vehicular, ya sea temporales o permanentes, que se encuentren instaladas en el tramo carretero a estudiar. En México, este tipo de datos se publican anualmente en los datos viales que presenta la Dirección General de Servicios Técnicos (DGST) de la Secretaría de Infraestructura, Comunicaciones y Transportes (SICT) para la Red Carretera Federal. Al momento de seleccionar una de las dos opciones anteriores, es necesario considerar los recursos y el tiempo con el que se cuenta a la hora de llevar a cabo la investigación, aunque es recomendable elegir la primera opción (aforos en sitio) debido a que los resultados de las simulaciones a realizar serán más concretos y apegados a la realidad y el proceso de calibración y validación será mucho más sencillo de llevar a cabo. · Rutas Cuando la demanda del tránsito es definida a través de rutas, la información acerca del origen y destino de éstas no es requerida (Álvarez et al., 2018). En su lugar, la selección de una secuencia de tramos carreteros o segmentos de la red tiene que ser indicada para establecer por donde pasa la ruta. 3.1.3. Calibración y validaciónLa validación de un modelo de simulación indica que los resultados deben ser tan cercanos, como sea posible, a los datos reales (Alvarez et al., 2018) y, con el objetivo de alcanzar esa meta, es necesario adaptar algunos de los parámetros dentro del software (calibración). La calibración consiste en la modificación de parámetros locales y globales del modelo de simulación y trata de reproducir las capacidades del tránsito observado en campo (real) a través de la modificación de los parámetros de flujo de tránsito del modelo (tiempo de reacción, distancia entre vehículos, aceleraciones, velocidades, entre otros). (Bamdad Mehrabani et al., 2023, pp. 15-27). Generalmente, la principal variable a validar en los modelos de simulación, son los flujos vehiculares. Por ende, la validación se realiza por medio de una comparación entre los flujos de tránsito horario simulados (xi) y los flujos de tránsito horario reales (yi). En estudios recientes, se han encontrado varias alternativas para realizar la validación de los modelos. A continuación, se presentan algunas de ellas: - Ajuste de regresión lineal entre flujos reales y simulados Algunos autores como Schweizer et al. (2021) y Álvarez et al. (2018) han utilizado el ajuste de regresión lineal entre los volúmenes de tránsito observados o reales y aquellos simulados para validar modelos de simulación. El ajuste de regresión lineal es utilizado como una primera aproximación para verificar si existe, en promedio, una buena correspondencia entre los flujos vehiculares simulados y observados (Schweizer et al., 2021). Los indicadores por revisar en el ajuste de regresión lineal para concluir que los flujos reales y simulados son consistentes entre sí se presentan a continuación: ·
Pendiente (m) de la
línea de ajuste de regresión lineal: es aceptable si se encuentra dentro del
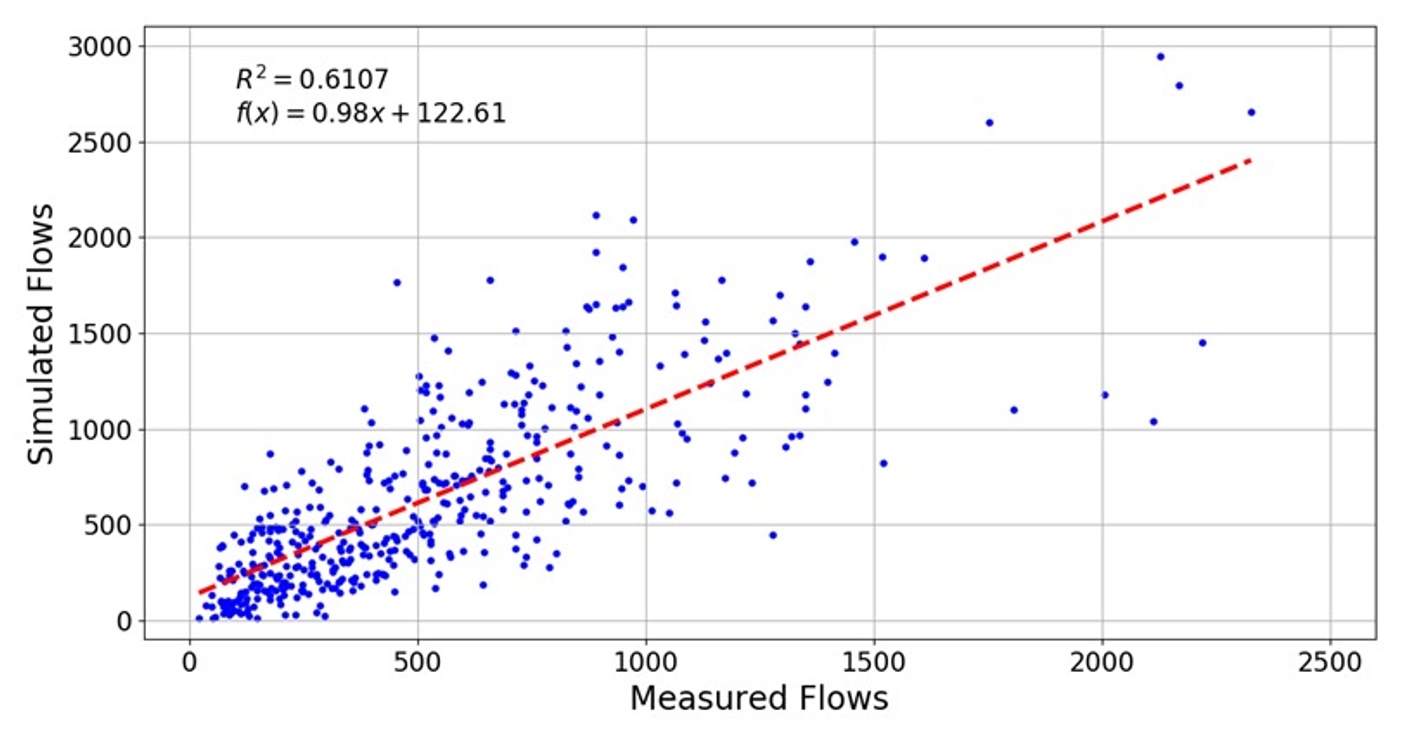
rango 0.9 · Valores p (p-values) significativos: El nivel de significancia de la relación entre variables (flujos) se estima haciendo referencia al “valor p” o p-value, por sus siglas en inglés. El valor p se define como el menor nivel de significancia que llevaría al rechazo de la hipótesis nula (H0) (Montgomery, 2013). Algunos autores (Di Leo y Sardanelli, 2020) mencionan que por décadas un valor p menor a 0.05 ha sido convencionalmente aceptado como umbral para discriminar resultados significativos de aquellos no significativos. La realidad es que entre más se acerque el valor p a cero los resultados también tendrán mayor significancia. · Coeficiente de Determinación (R2): Es una medida de la relación existente entre dos o más variables (flujos), a la cual no le afectan las unidades de medición empleadas para x y y. El coeficiente de determinación puede tener valores desde 0 hasta 1 (Anderson et al., 2008). El valor de R2 debe cumplir lo siguiente: R2 > 0.8 (Cascetta, 2001). Aunque entre más se acerque el valor de R2 a la unidad (1), la asociación entre los flujos vehiculares reales y simulados será más fuerte. La Figura 3 muestra un ajuste de regresión lineal realizado por Schweizer et al. (2021). En ese ajuste no se cumple con el valor de R2 mínimo, por lo que se concluye que los flujos no son consistentes entre sí.
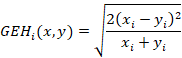
Figura 3. Flujos simulados contra flujos reales (observados o medidos) en vehículos por hora. Fuente: (Schweizer et al., 2021). - Uso del indicador estadístico GEH El estadístico GEH es un indicador bien establecido que ha sido utilizado para validar diversos escenarios de simulación (Tawfeek et al., 2018). También es conocido como el indicador Geoffrey E. Havers (GEH) (Dalaff et al., 2013). El indicador GEH es un estadístico chi cuadrado modificado que incorpora, diferencias relativas y absolutas en la comparación de flujos simulados y observados o reales (Schweizer et al., 2021). El estadístico GEH se determina usando la ecuación (1) donde “x” y “y” representan, respectivamente, el volumen de tránsito horario simulado del modelo y el volumen de tránsito horario real (Dalaff et al., 2013).
Donde: xi = volumen de tránsito horario simulado. yi = volumen de tránsito horario real. Para interpretar los valores GEH resultantes de aplicar la ecuación (1), Dalaff et al. (2013) brindan los dominios mostrados en la Tabla 2.
Tabla 2. Significados de los diferentes dominios de GEH.
Fuente: Adaptado de (Dalaff et al., 2013).
- Otras herramientas utilizadas para calibrar y validar modelos de simulación. Cada tipo de software dispone de distintas herramientas que pueden ser empleadas para calibrar y validar los modelos de simulación. En el caso del software SUMO, se dispone del uso de calibradores que están incluidos en su paquetería. Estos calibradores permiten la adaptación dinámica de los flujos de tránsito y las velocidades de acuerdo con las mediciones registradas en los loops de inducción (detectores). El calibrador removerá o insertará vehículos, de tal forma que los flujos simulados se apeguen a los flujos medidos (Alvarez et al., 2018). Otro método que se emplea en el software SUMO considera la aplicación del programa de código abierto denominado Cadyts (Calibration of Dynamic Traffic Simulations), el cual, es un modelo Bayesiano de calibración para la elección de rutas (Alvarez et al., 2018). Este software busca generar correspondencia entre flujos simulados y medidos (reales) ajustando, a priori, una distribución de elección de rutas a partir de las mediciones del flujo de tránsito (Flötteröd, 2008). PTV Vissim posee un modelo de seguimiento del vehículo denominado modelo de Wiedemann, que contiene parámetros que se utilizan para hacer la calibración del modelo, de entre los que destacan la separación media en detención, la parte aditiva y la multiplicativa de la distancia de seguridad (Flórez y Vargas, 2019). En Aimsun a través del uso de detectores de flujos de tránsito, se pueden determinar las series de tiempo de datos reales y las series de tiempo simuladas para visualizar un gráfico de ajuste de regresión lineal, el cual muestra el coeficiente de determinación (R2). Adicionalmente, se puede calcular (para cada detector colocado) el indicador estadístico GEH, que se determina automáticamente, ya que tiene un algoritmo interno que realiza este cálculo. En SUMO, este proceso se debe hacer a mano extrayendo primero los flujos simulados e ingresándolos a la ecuación del estadístico GEH para compararlos con los valores reales. Aimsun también calcula el indicador estadístico U de Theil de manera automática para validar modelos de micro simulación de tránsito, el cual es una medida de precisión relativa que compara los resultados simulados con los datos reales. La estadística U de Theil se calcula para cada detector y devuelve cuatro valores posibles (Aimsun SLU, 2023): 1. Negro: No aplicable. No hay datos para el detector. 2. Verde: Buen ajuste. La U de Theil está entre 0 y 0.2. 3. Naranja: Requiere más investigación: El estadístico U de Theil está entre 0.2 y 0.7. 4. Rojo: Inaceptable. La U de Theil es mayor a 0.7.
4. Conclusiones Los tipos de modelos de simulación que existen son: microscópico, mesoscópico, macroscópico e híbridos, atendiendo a su clasificación por el nivel de detalle de las redes que se trabajan. Asimismo, para elaborar esos modelos, se mencionó que existen, el tipo de software comercial y el de acceso libre, abarcando la descripción de cuatro programas informáticos, comúnmente utilizados en la simulación de flujos de tránsito en carreteras. De las características mencionadas de los softwares se resalta que, los cuatro, proveen resultados razonables ya que se desempeñan relativamente bien, la selección de alguno de ellos depende del nivel de detalle y complejidad de la red o redes a analizar y el tipo de simulación requerida, ya que no todos los simuladores cuentan con módulos para realizar todos los tipos de simulaciones mencionadas. Asimismo, aunque el software de uso libre o no comercial se ha extendido ampliamente y prevalece porque es accesible, modificable y genera una alta compatibilidad con los principales sistemas operativos existentes en el mercado como Windows, Unix/Linux, entre otros, se identificaron algunas oportunidades de mejora, específicamente, en los siguientes puntos: de manera general, el desarrollo de las tres etapas de la metodología para llevar a cabo la simulación, requiere de mayor tiempo y trabajo, en relación al software comercial, debido a que gran variedad de procesos, se realizan paso a paso y de forma manual, pues, no genera automatización de los procesos más demandados, asimismo, las herramientas para la creación y edición de las redes viales no son tan sofisticadas, lo que ocasiona una demora considerable a la hora de detallar los diseños. En contraste, el software comercial tiene la mejor representación gráfica. Sin embargo, el software libre tiene mayor compatibilidad con herramientas que ayudan a la etapa de calibración y validación de los modelos de simulación. Las diferencias entre el software libre y el comercial no son significativas en cuestión de la generación de resultados o datos de salida, ya que todos ofrecen resultados precisos y confiables. La distinción recae en la forma de operar y realizar los procesos dentro de cada uno de ellos, su compatibilidad con sistemas operativos y otro tipo de software afín, así como también, en la representación gráfica de los modelos. Además, se mencionó que el proceso de simulación conlleva, principalmente, tres etapas: creación de la red, asignación de la demanda y calibración y validación. Resulta relevante mencionar, que para que un modelo se apegue a la realidad es importante realizar una correcta calibración y validación, de esta forma se asegura que los resultados son confiables. Por último, se considera que los modelos de simulación de los flujos de tránsito en carreteras resultan útiles para la planificación y gestión del tránsito, así como para el desarrollo de medidas de mejora tanto en la operación como en la seguridad vial de una calle o carretera, ya que se pueden reducir los niveles de congestión, se diseñan adecuadamente los cruces o enlaces y ayudan a estimar el tiempo y el costo de los desplazamientos para una movilidad eficiente y segura. Referencias bibliográficasAimsun SLU. (2023). Manual de usuario de Aimsun Next 22.0.1. Aimsun SLU. https://docs.aimsun.com/next/22.0.1/UsersManual/CalibrationAndValidationOfAimsunModels.html#model-build-and-static-check Aji, R., y Taufiq, I. (2012). Comparison of two microsimulation softwares Aimsun and Sumo for Highway Traffic Modeling. Linköping University. https://www.diva-portal.org/smash/get/diva2:555913/FULLTEXT01.pdf Alvarez , P., Behrisch, M., Bieker, L., Erdmann, J., Pang , Y., Hilbrich, R., . . . Wießner, E. (2018). 2018 21.ª Conferencia Internacional sobre Sistemas de Transporte Inteligentes (ITSC). Simulación de tráfico microscópico utilizando SUMO (pp. 2575-2582). Maui: IEEE. https://doi.org/10.1109/ITSC.2018.8569938 Anderson, D., Sweeney, D., y Williams, T. (2008). Estadística para administración y economía (Décima ed.). Ciudad de México: Cengage Learning Editores, S.A. de C.V. Atiencia, N., y Ramírez, V. (2013). Control de tráfico vehicular usando un sistema neuro-difuso tipo ANFIS. Escuela Politécnica Nacional. Escuela Politécnica Nacional. https://bibdigital.epn.edu.ec/bitstream/15000/6340/1/CD-4864.pdf Bamdad Mehrabani, B., Sgambi, L., Maerivoet, S., y Snelder, M. (2023). Conferencia de usuarios de SUMO 2023. Desarrollo, calibración y validación de un modelo de simulación de tráfico a gran escala: red de carreteras de Bélgica. 4, pp. 15-27. Berlin: Centro Aeroespacial Alemán. https://doi.org/10.52825/scp.v4i.199 Behrisch, M., Bieker, L., Erdmann, J., y Krajzewicz, D. (2011). SUMO - Simulation of Urban Mobility: An Overview. The Third International Conference on Advances in System Simulation. Barcelona: IARIA. https://sumo.dlr.de/pdf/simul_2011_3_40_50150.pdf Cascetta, E. (2001). Transportation Systems Engineering: Theory and Methods. Berling: Springer Science and Business Media LLC. Dalaff, C., Ebendt, R., Erdmann, J., Gurczik, G., y Tcheumadjeu, L. (2013). SUMO2013: la primera conferencia de usuarios de SUMO. Evaluación comparativa de los resultados de simulación de tráfico generado por SUMO basados en la estadística GEH. Berlín: German Aerospace Center. https://www.researchgate.net/publication/259897967_Benchmarking_SUMO_Generated_Traffic_Simulation_Results_Based_on_GEH_Statistic Di Leo, G., y Sardanelli, F. (2020). Statistical significance: p value, 0.05 threshold, and applications to radiomics—reasons for a conservative approach. European Radiology Experimental, 4(18). https://doi.org/10.1186/s41747-020-0145-y Ejército, P., Nebrija, K., Feria, R., y Figueroa, L. (2017). Revisión de software de simulación de tráfico. Octava Conferencia Internacional sobre Información, Inteligencia, Sistemas y Aplicaciones (IISA) (pp. 1-4). Lárnaca: IISA. https://doi.org/10.1109/IISA.2017.8316415. Flórez, S., y Vargas, D. (2019). Calibración y validación de parametros de comportamiento mediante microsimulación en intersecciones, caso estudio Tunja. Tunja: Universidad pedagógica y tecnológica de Colombia. Flötteröd, G. (2008). Traffic state estimation with multi-agent simulations. Ph.D. thesis. Berlin: Technical University of Berlin. García, F., y Romero, J. (2020). Diseño de un modelo de simulación, utilizando un software de eventos discretos, en una línea de producción de tejido industrial. Revista Internacional de Investigación e Innovación Tecnológica, 8(44). https://ciateq.repositorioinstitucional.mx/jspui/bitstream/1020/404/1/Dise%C3%B1o%20de%20un%20modelo%20de%20simulacion.pdf Hoogendoorn, S., y Bovy, P. (2001). State-of-the-art of vehicular traffic flow modeling. Journal of Systems and Control Engineering(215), 283-303. https://doi.org/10.1243/0959651011541120 Kotusevski , G., y Hawick, K. (2009). A Review of Traffic Simulation Software. Research Letters in the Information and Mathematical Sciences, 13, 35-54. http://hdl.handle.net/10179/4506 MATSim. (13 de Junio de 2024). Multi-Agent Transport Simulation. https://matsim.org/ Montgomery, D. (2013). Design and analysis of experiments (Octava ed.). Danvers: John Wiley & Sons, Inc. OSM. (02 de abril de 2024). Open Street Map. Open Street Map: file:///C:/Program%20Files%20(x86)/Eclipse/Sumo/tools/webWizard/index.html Sanghyun , S., Yi-Ling , Q., Jason , S., y Ming , C. (2022). Differentiable Hybrid Traffic Simulation. ACM Transactions on Graphics, 41(6), 1-10. https://doi.org/10.1145/3550454.3555492 Schweizer, J., Poliziani, C., Rupi, F., Morgano, D., y Magi, M. (2021). Building a Large-Scale Micro-Simulation Transport Scenario Using Big Data. International Journal of Geo-Information, 10(3), 165. https://doi.org/10.3390/ijgi10030165 Tawfeek, M., Mohamed, E., Khaled, E., y Hatem, A. (2018). In Proceedings of the Canadian Society for Civil Engineering 2018 Annual Conference. Calibration and Validation of Micro-Simulation Models Using Measurable Variables. Fredericton: Canadian Society for Civil Engineering . https://www.proceedings.com/49621.html
GARCÍA Eduardo Daniel CASANOVA Wendy Alejandra “Las opiniones expresadas en esta publicación son de los autores y no necesariamente reflejan los puntos de vista del Instituto Mexicano del Transporte”
|