|
||||
Introducción Es evidente que los vehículos de transporte carretero satisfacen en gran medida la necesidad de desplazar tanto bienes materiales como personas y, con ello, se constituyen en participantes fundamentales del desarrollo de la sociedad. Como elemento del sistema de transporte, el vehículo convencional requiere ser conducido, siendo el conductor el responsable de decidir las acciones y maniobras que ejecute al transitar. A menudo, decisiones equivocadas son producto del desconocimiento, de falta de habilidad, de destrezas limitadas o de actitudes negativas. Acciones derivadas de decisiones erradas pueden resultar en siniestros viales, como lo muestran las estadísticas de esos hechos, en el que el factor humano, es decir, el conductor, es el causante en más del 90% de los casos de siniestro vial. Esta situación es generalizada, tanto en accidentes en zonas urbanas y suburbanas como en carreteras federales, [1, 2]. Aunque con menor participación en número de accidentes que los automóviles, los vehículos de autotransporte como autobuses de pasajeros, camiones y tractocamiones, representan una mayor potencialidad de daño en caso de un siniestro, dados su gran tamaño y capacidad de carga, a los que se asocia una gran cantidad de energía en movimiento. Aspectos como éste confieren gran relevancia al hecho de que se requiere una adecuada capacitación para conducir un vehículo de autotransporte. No obstante, la presentación de una constancia de capacitación frecuentemente no es garantía de que los conductores hayan desarrollado las habilidades adecuadas para conducir, cuyas carencias pueden reflejarse, en la práctica, en acciones inadecuadas de operación de los vehículos, tanto en seguridad como en las técnicas de conducción. Por tanto, es necesario contar con un método que permita verificar las capacidades y estilos de conducción de operadores y, con ello, lograr orientar mejores esquemas de capacitación y adquisición de las competencias para la conducción. Para monitorear el estado de funcionamiento y acciones de control de la operación, la gran mayoría de los vehículos actuales están equipados con diversos sensores y actuadores electrónicos. Las señales de información se procesan por una computadora central, que dirige el funcionamiento del vehículo para una operación más confiable y segura de los usuarios. Tal información es transmitida por un bus de datos aplicando diversos protocolos de comunicación, como es el caso de la Red de Área de Controlador (CAN, Controller Area Network) y, gracias a ello, los mensajes circulantes pueden ser colectados a través del puerto OBD-II. Con el fin de explorar alternativas para evidenciar las características de conducción de los operadores de vehículos de autotransporte, se propuso utilizar la información que se genera a través de la comunicación bajo el protocolo CAN de los sensores y equipos de los vehículos. Esto, bajo el hecho de que a través del análisis de esa información es posible identificar aspectos relevantes del estilo de conducción y el grado en el que el conductor aprovecha el conocimiento y técnicas para la operación de vehículos. Con base en esa premisa, se desarrolló una metodología que incluye la aplicación de un programa para adquirir datos que se transmiten por el CAN-bus del vehículo, así como los medios de identificación y decodificación de las variables asociadas a los sensores y equipos presentes en el mismo. Esta información es procesada para identificar el comportamiento de operación de acuerdo a las acciones del conductor, con el fin de identificar las características sobresalientes de su estilo de conducción. Para mostrar dicha metodología, se presenta el análisis de un conjunto de datos de varios operadores al ejecutar diversas maniobras de prueba.
Protocolo CAN El sistema o protocolo CAN, bus serial desarrollado por la empresa Bosch, es actualmente el estándar de comunicación más utilizado en los vehículos. La estructura del protocolo tiene su base en el concepto de modelo productor/consumidor, lo que implica que su diseño está orientado a mejorar la forma en que se comparte la información de los diferentes sensores y actuadores. El bus CAN opera sobre dos capas del modelo de Interconexión de Sistemas Abiertos (OSI, Open Systems Interconnection), las cuales corresponden a la capa física y a la capa de datos. Básicamente, es un sistema de transferencia de datos en red de alta velocidad donde la información se transmite por dos cables, siendo esto muy superior a la tecnología convencional serial RS232. La información y datos que fluyen por el bus se transmiten en múltiples ciclos (bucles) y su estructuración permite separar los procesos que consumen y producen datos a diferentes velocidades de transferencia [3]. Por ejemplo, una versión de bus con transmisión tolerante a fallas soporta velocidades de transferencia de hasta 125 kbits por segundo (kbps) en líneas de transmisión con distancia de hasta 40 m, mientras que otras versiones soportan tasas de transferencia de hasta 1 Mbps. El bus CAN es usado principalmente en sistemas embebidos, aunque es una red con tecnología que provee rápida comunicación con microcontroladores y permite una comunicación abierta para dispositivos inteligentes. Cubre, incluso, requerimientos de procesamiento en tiempo real, eliminando la necesidad de usar otra tecnología más compleja y costosa. Los modelos actuales de vehículos comerciales incorporan el protocolo CAN para transmitir información de la operación y funcionamiento de cada uno de sus sistemas. A través de esa comunicación determinan la activación o desactivación de dispositivos para mantener y responder ante eventos que comprometan la seguridad, vigilando el adecuado funcionamiento del motor o de otros sistemas prioritarios en la operación. Cuando el sistema está energizado, cada sensor o equipo instalado genera información de manera prácticamente ininterrumpida, donde la computadora central se encarga de gestionar las acciones de operación, de acuerdo a las directrices del desempeño del vehículo y las acciones del conductor sobre los dispositivos de control [4]. Tanto las señales de las acciones como de las respuestas de los sistemas son registradas y transmitidas, por lo que pueden ser colectadas a través de un puerto de comunicación, como es el caso del OBD-II.
Metodología El ejercicio requirió el empleo del decodificador de señales PCAN-USB (Peak Systems) [5]. Para tener acceso al bus de datos, el decodificador se conectó al puerto OBD-II del vehículo a través de un conector apropiado compatible con la configuración de pines en la generalidad de vehículos pesados. Conector y decodificador se muestran en la Figura 1.
Figura 1. Decodificador y conector para colectar datos del puerto OBD-II de vehículos pesados.
La señal obtenida del bus de datos se pudo transmitir para su visualización y adquisición a una computadora portátil, la cual contaba con un programa para ese fin preparado con anterioridad, elaborado con base en la plataforma LabView-NI [6]. La decodificación y el procesamiento primario de la información se realizó con base en la estandarización de mensajes de comunicación bajo el protocolo CAN que aplican comúnmente vehículos de carga pesada de acuerdo con lo establecido por la SAE J1939 [7]. El equipo, con la adquisición controlada por el programa desarrollado, se empleó para obtener información durante la ejecución de maniobras de conducción ejecutadas por diferentes operadores. Un procesamiento posterior permitió refinar la presentación gráfica de la información para facilitar el análisis. En general, las maniobras ejecutadas comprendieron acciones de pruebas de aceleración y frenado en condiciones controladas, así como de conducción normal, empleando tractocamiones de diferente modelo y distinto nivel de equipamiento, provistos con un motor de combustión interna con combustible diésel. Con base en esa disponibilidad, se obtuvo información para validar la colectada por el programa para, posteriormente, identificar las variables disponibles que pudieran indicar el estilo de conducción en esquemas orientados de capacitación.
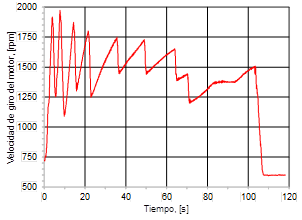
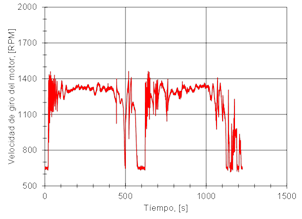
Variables de análisis Referencia de conducción Como referencia de conducción y con base en la ejecución de una maniobra de aceleración y frenado, se empleó un tractocamión de modelo reciente y con asistencia automatizada para aplicar cambios en la caja de transmisión. Cabe mencionar que, por la naturaleza de la maniobra, el propósito de ésta fue alcanzar una velocidad alta lo más rápido posible para, repentinamente, aplicar el freno en una sola etapa y detener totalmente el vehículo. Esto requirió mantener el acelerador a fondo prácticamente durante todo el avance, en el que se recorrió una distancia de aproximadamente 1,5 km. Aunque el equipamiento del vehículo permitió disponer información de un número considerable de variables, para el análisis se eligieron las velocidades de giro del motor y de avance del tractocamión, como se muestra en la Figura 2 y en la Figura 3, con registros en un periodo de tiempo menor a 2 minutos de duración de la prueba. Como se observa del historial de la velocidad de giro del motor, el inicio del desplazamiento se dio a partir de la velocidad de acoplamiento del embrague, cercana a 700 rpm (revoluciones por minuto). Conforme a la demanda de incremento de la velocidad, el intervalo de operación del motor estuvo entre 1100 rpm y 1900 rpm, en los que se hace evidente los cambios en la caja de transmisión y que alcanza las mayores velocidades de giro en los primeros tres cambios.
Figura 2. Velocidad de giro del motor durante maniobra de aceleración y frenado repentino.
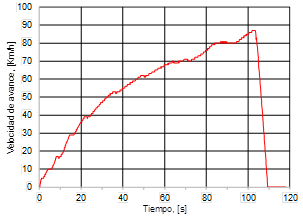
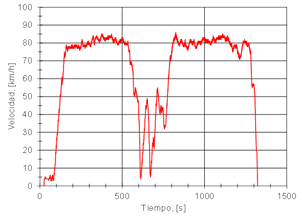
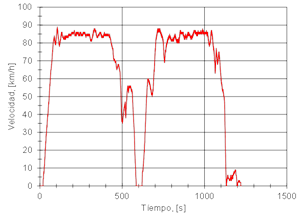
Figura 3. Velocidad de avance del vehículo durante maniobra de aceleración y frenado repentino.
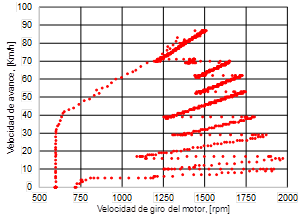
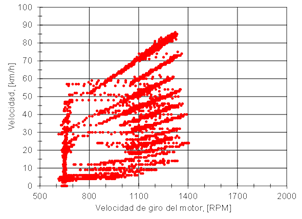
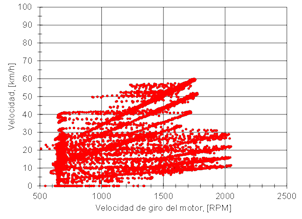
De manera simultánea, se incrementó gradualmente la velocidad de avance, como se muestra en la Figura 3, cuyo comportamiento permite identificar las zonas de cambio de marcha (segmentos horizontales). De la comparación del historial de estas velocidades, de giro y de avance, se observa el término de la maniobra, en la que la velocidad de giro del motor alcanza el régimen denominado ralentí, de aproximadamente 600 rpm, mientras que la velocidad de avance desciende súbitamente hasta alcanzar la detención. Esto implica que, aunque el vehículo se detuvo, el motor continuó funcionando de manera normal estable una vez concluida la maniobra a los 110 s, aproximadamente. La combinación de las variables previas, mostrada en la Figura 4, complementa el desempeño de la conducción, cuyo análisis permiten identificar el uso de la transmisión a través de los cambios de la velocidad de giro del motor y su reflejo en la velocidad de avance. En el diagrama se identifica el inicio del avance a la velocidad de giro cercana a 700 rpm, con la marcha más baja que se incrementa hasta poco más de 1900 rpm para alcanzar una velocidad de avance de 10 km/h. Los cambios de marcha en la trasmisión se observan de manera natural con un comportamiento plano (horizontal), para luego presentarse la tendencia de inclinación en ascenso que corresponde al desarrollo de la velocidad de avance incrementando la velocidad de giro del motor, cambios realizados hasta alcanzar una velocidad de 87 km/h.
Figura 4. Diagrama de velocidades resultante durante maniobra de aceleración y frenado repentino.
La definición de los trazos diagonales muestra la limpieza de los cambios de marcha en un intervalo cada vez más estrecho en las marchas superiores. Este comportamiento es congruente con el aprovechamiento esperado del par que genera el motor y se transmite a las ruedas motrices, pues el mayor par se obtiene en las marchas más bajas. Identificación de estilos en conducción normal Para la identificación de estilo se programó un recorrido por carretera de aproximadamente 25 km de longitud, dividido en dos tramos de similar distancia, uno de ida y otro de retorno. Esto implicó que a mitad del recorrido debieron detenerse para tomar el retorno. Para este caso se empleó un tractocamión con equipamiento austero de modelo 2013 en excelentes condiciones físico-mecánicas y tres diferentes conductores, de cuyos registros de datos a través del bus CAN se tomaron las variables de velocidades de giro del motor y de avance del vehículo. Del desempeño del primer conductor se obtuvieron los registros mostrados en la Figura 5, velocidad de giro del motor, y en la Figura 6, velocidad de avance. Como en la secuencia anterior, con ambas variables se obtuvo la combinación mostrada en la Figura 7.
Figura 5 – Velocidad de giro del motor durante recorrido en carretera con el primer operador.
Figura 6 – Velocidad de avance durante recorrido en carretera con el primer operador.
El gráfico de velocidad de giro muestra que el operador trató de mantener la operación del motor en el intervalo más bajo de velocidad de giro, por debajo de 1300 rpm. La secuencia de cambios en la etapa inicial del movimiento; es decir, en el arranque, las ejecutó a velocidades de giro inferiores a 1100 rpm, para posteriormente incrementar la velocidad de régimen con los posteriores cambios de marcha hasta alcanzar las proximidades de 80 km/h. En la cercanía del final del primer tramo, aplicó cambios secuenciales hacia marchas inferiores. Al concluirlo, no consideró necesario el paro total del tractocamión para ejecutar la maniobra de retorno, la cual realizó a baja velocidad. El recorrido del tramo de regreso fue realizado de manera similar, que se observa en el régimen de operación del motor como en la velocidad de avance.
Figura 7 – Diagrama de velocidades resultante durante recorrido en carretera con el primer operador.
Por otro lado, de la gráfica que combina ambas velocidades se confirma el intervalo de bajos valores de velocidad del motor y la ejecución de cambio de las marchas. No obstante, también se observa que en algunas ocasiones ejecutó el cambio de marchas altas ampliando el límite inferior de la velocidad de giro del motor, como se indica para velocidades de avance mayores a 25 km/h y hasta poco menos de 60 km/h. En general, se estima que el conductor priorizó la operación del vehículo hacia el ahorro de combustible sobre el mejor aprovechamiento del par. Los registros correspondientes al desempeño del segundo conductor se presentan, respectivamente en la Figura 8 y en la Figura 9 para la velocidad de giro y la velocidad de avance.
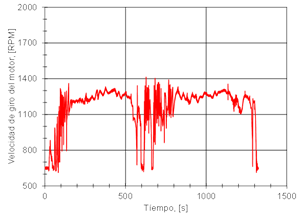
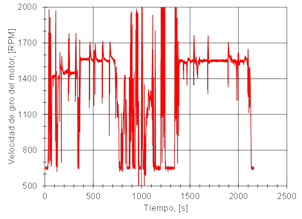
Figura 8 – Velocidad de giro del motor durante recorrido en carretera con el segundo operador.
Como se aprecia, la velocidad de giro del motor tuvo amplias variaciones que cubrieron todo su intervalo de operación, cuyos cambios frecuentes denotan, a primera instancia, falta de habilidad para la operación del vehículo. Como se aprecia alrededor del tiempo de 1000 s, se registraron velocidades de giro por debajo del valor de ralentí, el cual era ligeramente mayor a 600 rpm, indicador de una mala operación en ese momento, que posiblemente llevó al paro del motor.
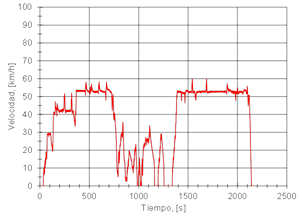
Figura 9 – Velocidad de avance durante recorrido en carretera con el segundo operador.
El comportamiento de la velocidad de avance confirma lo enunciado anteriormente, donde se observan variaciones súbitas de velocidad, aunque perfila una velocidad de poco más de 50 km/h. En el segundo tramo del recorrido, que se aprecia posterior a 1300 s del recorrido, la menor variación muestra una aparente mejora en la conducción, que se mantiene con picos menos frecuentes, aunque aún con una baja velocidad de avance en carretera. El diagrama de velocidad resultante para esta operación, mostrado en la Figura 10, evidencia la falta de pericia del operador, donde incluso se observa que hubo acciones de aceleración sin avance del vehículo. Así también lo muestra los amplios intervalos para la ejecución de los cambios de marcha y el exceso de operación a velocidades altas de giro del motor. Estos hechos conducen a la falta de habilidad del conductor para operar el vehículo y, por tanto, la necesaria capacitación y debido entrenamiento para lograrlo.
Figura 10 – Diagrama de velocidades resultante durante recorrido en carretera con el segundo operador.
Respecto al tercer operador, los registros que evidencian su desempeño se exponen de la Figura 11 a la 13, en la misma secuencia que para los conductores previos. En este caso, la gráfica de velocidad de giro muestra el intervalo de operación de 1100 rpm a 1400 rpm, cuyos cambios de marcha sugieren que se alcanza con prontitud una velocidad de avance estable. Así mismo, se infiere que próximo al fin del primer tramo se aplicó cambios de marcha descendentes para aprovechar la capacidad de frenado del motor y facilitar la detención. El comportamiento para el segundo tramo, de retorno, es similar a la operación aplicada en el primero, manteniendo, en general, la uniformidad de la velocidad de giro del motor alrededor de 1300 rpm.
Figura 11 – Velocidad de giro del motor durante recorrido en carretera con el tercer operador.
Figura 12 – Velocidad de avance durante recorrido en carretera con el tercer operador.
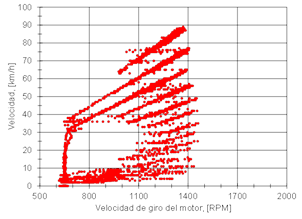
Por otro lado, los registros de la velocidad de avance en la Figura 12 muestran que se alcanza relativamente rápido la velocidad esperada para el tránsito en carretera, ligeramente superior a 80 km/h. Esta velocidad de crucero se mantiene tanto en el primero como en el segundo tramo, mostrando también que al terminar el primero e iniciar el segundo existió una parada total, reforzando las posibles acciones deducidas del gráfico previo. Al final del segundo tramo, después de una primera detención, se presentan un desplazamiento a baja velocidad, posiblemente por alguna maniobra de acomodo del tractocamión posterior al término del recorrido. De forma similar a los casos de análisis de la conducción de los operadores previos, se obtuvo el diagrama de velocidades, presentado en la Figura 13. La clara definición de los trazos indica un mejor aprovechamiento del régimen de operación del motor en el intervalo de 1000 rpm a 1400 rpm que, además, el conductor toma ventaja para alcanzar la velocidad de avance de crucero y mantenerla estable durante el recorrido.
Figura 13 – Diagrama de velocidades resultante durante recorrido en carretera con el tercer operador.
De la comparación del desempeño de los conductores, de acuerdo con el análisis de los registros obtenidos del bus CAN, se concluye que el primero y el tercer conductor mostraron mayor habilidad en la conducción del tractocamión. El segundo operador requiere desarrollar la habilidad necesaria, que puede ser a través de un curso de capacitación para la operación de vehículos pesados.
Conclusiones La red de área de controlador (Controller Area Network, CAN) es un protocolo diseñado para transmitir mensajes de manera confiable entre sensores, dispositivos y unidades de control en un vehículo, con base en niveles de prioridad. Los vehículos actuales están equipados con un conjunto de sensores electrónicos que registran y transmiten información en función de las acciones y respuestas durante la conducción. La información constituye un historial de datos de las acciones del conductor y la respuesta mecánica del vehículo, que puede ser obtenida conociendo la codificación del protocolo de comunicación entre ellos. Las características de la conducción que definen a un operador brindan información que puede ser aplicada para modificar, reforzar o corregir el comportamiento del conductor a través de la capacitación orientada, así como para el desarrollo de sistemas de asistencia a la conducción. Un medio para identificar esas características es la información que registran y transmiten los sensores del vehículo de acuerdo con el accionamiento de los actuadores para su operación. La mayor información disponible de los mensajes de los sensores en el bus de datos facilita la determinación de un estilo de conducción. En este caso, solamente se representaron dos variables de la operación: la velocidad de giro del motor y la velocidad de avance, suficiente para ilustrar la potencialidad del uso de esa información en la definición de la operación por parte del conductor. Agregando condiciones específicas, el análisis de las variables CAN puede también ser aplicado para evaluar el aprendizaje de conductores en cursos de conducción, ya sea orientados a la economía del combustible, al aprovechamiento de prestaciones o de capacitación y verificación del aprendizaje práctico. Este esquema de análisis puede complementar otros sistemas o métodos de identificación y/o de evaluación más complejos, que incluyan señales biomédicas/fisiológicas del conductor. Lo aquí descrito es un ejemplo del uso de la información proporcionada por los diferentes sensores del vehículo a través del protocolo CAN. Mayor detalle en la definición de las características o de un estilo de conducción puede lograrse agregando otros parámetros, si están disponibles, como el accionamiento de pedales y la respuesta de sensores de otros sistemas y dispositivos de seguridad.
Referencias [1] INEGI. (2022). Accidentes de tránsito. Accidentes por causa. [Consulta en línea]. https://www.inegi.org.mx/temas/accidentes/ [2] Cuevas C., A. C.; Cadengo R., M.; Mendoza D., A. (2021). Anuario estadístico de colisiones en carreteras federales 2020. Documento Técnico No. 83. Instituto Mexicano del Transporte. Sanfandila, Qro. [Documento PDF disponible en]. https://www.sct.gob.mx/fileadmin/DireccionesGrales/DGAF/EST_Accidentes_CF/Anuario_2020.pdf [3] Sánchez Vela, L.; Molano Clemente, M.; Fabela Gallegos, M.; Martínez Madrid, M.; Hernández Jiménez, J.; Vázquez Vega, D.; Flores Centeno, O. (2016). Revisión documental del protocolo CAN como herramienta de comunicación y aplicación en vehículos. Publicación Técnica No. 474. Instituto Mexicano del Transporte. Sanfandila, Qro. [4] CAN in Automation. History of the CAN technology. (2021). [Consulta en línea] https://www.can-cia.org/can-knowledge/can/can-history/ [5] PEAK-System. PCAN-USB: CAN Interface for USB. (2021). [Consulta en línea]. https://www.peak-system.com/PCAN-USB.199.0.html?&L=1 [6] Cruz Acevedo, M., Hernández Jiménez, J., Fabela Gallegos, M., Flores Centeno, O., Vázquez Vega, D., Sánchez Vela, L. Programa para la detección y adquisición de variables de operación de vehículos bajo el protocolo CAN. (2021). Publicación Técnica No. 661. Instituto Mexicano del Transporte. Sanfandila, Qro. [7] SAE International. (MAY2012). Vehicle Application Layer. Surface Vehicle Recommended Practice SAE J1939-71.
FABELA Manuel CRUZ Mauricio FLORES Oscar “Las opiniones expresadas en esta publicación son de los autores y no necesariamente reflejan los puntos de vista del Instituto Mexicano del Transporte” |