|
|||||
En 2010 se proclamó al periodo 2011-2020 como “Decenio de Acción para la Seguridad Vial” con el objeto de estabilizar y reducir las cifras previstas de víctimas mortales en accidentes de tránsito en todo el mundo [ONU, 2010]. En México, se tiene la percepción de que la accidentalidad en las vialidades se debe a la laxitud con que se aplican las regulaciones para el control de la velocidad, conducción bajo efectos de alcohol o drogas, así como el uso del cinturón de seguridad. Uno de los factores de riesgo que influyen en una colisión es la velocidad excesiva o inadecuada, por lo tanto el área de oportunidad para el cumplimiento de la normativa en nuestras carreteras es muy grande, de ahí la importancia de generar mecanismos de vigilancia y control del tránsito más eficaces desde el punto de vista de la prevención de colisiones. La instalación de estaciones fijas automatizadas para el control de velocidad, peso y dimensiones en las Carreteras Federales será un paso más en la reducción de accidentes y su severidad, ya que la detección e identificación, así como la generación y envío a domicilio de la sanción correspondiente a la violación de la normativa instará a los conductores a respetar los límites de velocidad y en el caso de los vehículos pesados de carga y pasaje los límites de peso y dimensiones. En términos generales las estaciones para el control de velocidad, peso y dimensiones están integradas por sensores de detección, un sistema de reconocimiento de placas, un sistema de telecomunicaciones para el envío de datos (celular y/o satelital) y un centro de monitoreo y control. Es importante mencionar que instalar los sensores sin infraccionar al conductor limita el éxito de la medida. En este artículo se presentan los resultados de un estudio dirigido a proponer los primeros sitios para instalar estaciones fijas automatizadas para el control del peso, dimensiones y velocidad de los vehículos que circulan en la Red Carretera Federal (RCF).
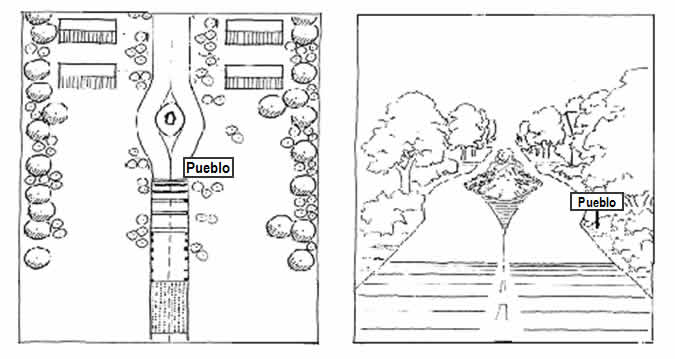
Estaciones automatizadas de control de velocidad Uno de los impactos positivos de la velocidad es, indudablemente, que permite reducir los tiempos de viaje, y con ello mejora, la movilidad, contribuyendo al desarrollo de la economía, facilitando el acceso al empleo, bienes y servicios. Sin embargo, la velocidad también tiene consecuencias negativas, principalmente en la frecuencia y severidad de las colisiones y contingencias ambientales. La velocidad elegida depende de la interacción entre el procesamiento de información del conductor y la toma de decisiones, así como de las características físicas y operativas de la carretera y su entorno. La ciencia moderna muestra que la elección de velocidad, así como la elección de ubicación en la carretera es en su mayoría un proceso subconsciente [Sibylle B. et al, 2012]. La velocidad excesiva o inadecuada es el principal problema de seguridad vial en muchos países como México, en donde tan sólo en 2010 ocasionó el 64% del total de accidentes en las Carreteras Federales y el 75% del total de muertos, además de ser un factor agravante de muchos de los accidentes [Cuevas et al, 2013]. Las medidas en materia de modernización de la infraestructura o de ingeniería vial pueden contribuir de forma muy eficaz a la gestión de la velocidad en la red carretera. Es importante que estas medidas apuesten a una infraestructura más consistente, homogénea y segura, que satisfaga las necesidades de todos los usuarios; por ejemplo, los conductores que después de un periodo de tiempo de circular a altas velocidades y que ingresan a una zona en la que debieran reducir su marcha, experimentan un fenómeno en el que subestiman su velocidad y no la reducen lo suficiente. Para estos casos, existen medidas de advertencia anticipadas, como la mostrada en la Figura 1, en la que mediante una isleta y señalamiento horizontal y vertical, se refuerza el cambio del entorno para que se reduzca la velocidad.
Figura 1 Croquis de modificación en la infraestructura y señalamiento que informa del ingreso a una zona urbana Fuente: Birth, S. y Sieber, G., 2004.
Los requisitos previos para el éxito de cualquier medida relativa a la gestión de la velocidad, cumplimiento de las normas, señales de tránsito e ingeniería de vehículos, son: la educación a los niños, la formación a los conductores y la información a los usuarios de las vialidades. Si se logra que los ciudadanos se familiaricen con la normativa y las medidas orientadas a la seguridad, éstas serán más eficaces y tendrán mayor aceptación, ya que sabrán cómo aplicarlas y comprenderán las razones para adoptarlas. En México hay algunos ejemplos de acciones en favor de la educación vial a los niños (véase Figura 2).
Figura 2 Algunos ejemplos de educación vial a niños
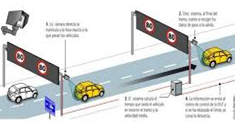
La efectividad del control y la vigilancia viene determinada por la presencia de dispositivos automatizados y de oficiales de policía que producen una percepción de miedo a ser sancionado y/o detenido, evitando por lo tanto que el conductor incumpla algunas normas o disposiciones de tránsito. Las experiencias policíacas afirman que: (I) la sanción más eficaz es la que se aplica y se comunica de manera inmediata al infractor; (II) el efecto de la sanción económica debe ser proporcional al nivel de ingresos económicos del mismo; (III) la sanción económica inhibe, pero en la mayoría de los casos no modifica el comportamiento del conductor; (IV) la sanción no modificará la conducta si el conductor no conoce bien todos los peligros reales de su infracción; y (V) el infractor no debe percibir la sanción como una vía de recaudación económica. Existen tres tipos de técnicas para el control de velocidad: (I) radares o pistolas láser que miden la velocidad media entre dos puntos y con zonas de detección de vehículos por parte de la policía en áreas visibles; (II) postes de observación y zonas habilitadas para la detección de vehículos por la policía, las cuales cuentan con visibilidad suficiente; y (III) el estilo americano, en donde los agentes de policía registran la velocidad desde el interior de su vehículo utilizando un radar montado en la ventanilla de la patrulla y una vez detectado el exceso, el agente policíaco procede a la detención del vehículo mediante una señal o persecución y posteriormente al levantamiento de la infracción correspondiente (véase Figura 3).
Figura 3 Diferentes técnicas para el control de la velocidad
En una primera fase del estudio se propusieron una serie de sitios piloto para instalar un sistema de toma de velocidades automatizada de los vehículos que circulan en las principales carreteras que ingresan a la Ciudad de México, en función de la siniestralidad causada por la velocidad excesiva. Posteriormente, se realizó una propuesta para la totalidad de tramos de la RCF con un listado por segmentos carreteros de 1 km que concentraron, en ambos sentidos, 20 o más accidentes cuya causa principal fue la velocidad excesiva. Para determinar la accidentalidad en las autopistas que ingresan a la Ciudad de México se utilizaron las bases de datos de accidentes ocurridos de 2008 a 2010 en las Carreteras Federales [SAADA, 2010, SAADA, 2011 y SAADA, 2012], ya que a la fecha los datos del 2011 y 2012 no han sido todavía procesados. La información se dividió por tramos carreteros, de acuerdo con la clasificación que utiliza la Dirección General de Servicios Técnicos de la SCT para la Red Carretera Federal y se separó por sentidos de circulación, utilizando los kilometrajes de inicio y terminación, así como el Tránsito Diario Promedio Anual para 2010. Posteriormente, se realizó una visita técnica de campo, conjuntamente con personal de varios organismos involucrados, con el propósito de definir el sitio exacto de la ubicación de los dispositivos automatizados para el control de la velocidad. Los resultados obtenidos son los siguientes: Sitio 1. Ubicación en el km 105 de la autopista México-Querétaro, sentido 2 Sitio 2. Ubicación en el km 116 de la autopista México-Querétaro, sentido 1 Sitio 3. Ubicación en el km 54+500 de la autopista México-Puebla, sentido 2 Sitio 4. Ubicación en el km 66+000 de la autopista México-Puebla, sentido 1 Sitio 5. Ubicación en el km 50+800 de la autopista México-Cuernavaca, sentido 1 Sitio 6. Ubicación en el km 37+200 de la carretera México-Toluca libre, sentido 1 Sitio 7. Ubicación en el km 30+750 de la autopista México-Tizayuca, sentido 2
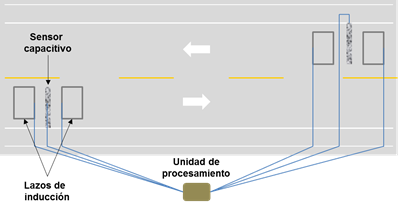
Estaciones automatizadas de control de peso y dimensiones Desde hace más de 50 años existe la necesidad de evaluar el peso de los vehículos de carga por razones de diseño, mantenimiento y conservación de puentes y pavimentos de carreteras. Actualmente, el objetivo principal de instalar un sistema de pesaje es incrementar la seguridad vial en las carreteras y disminuir la magnitud del daño provocado a los pavimentos y puentes, derivados de los excesos en el peso y dimensiones de los vehículos pesados. Las dos formas básicas para determinar el peso son las pesadoras estáticas y pesadoras dinámicas. Las pesadoras estáticas son las más utilizadas para determinar el peso de los vehículos, los cuales deben permanecer inmóviles durante el pesaje. Se pesa el vehículo completo en una sola maniobra o por grupos de ejes, que requieren de maniobras adicionales. Esto lo hace un método poco eficaz para aplicarse a grandes volúmenes de vehículos, así como predecible en cuanto a la ubicación de la pesadora aunque no en cuanto al momento en que ésta se encuentra funcionando. El pesaje dinámico tiene las ventajas de que puede pesar a todos los vehículos que circulan por una carretera, su precisión es suficiente para aplicaciones estadísticas y para la preselección de vehículos supuestamente sobrecargados, además de que puede operar de manera continua, es decir las 24 horas de los 365 días del año. Su principal desventaja es que no tiene la suficiente precisión para sancionar a los vehículos que circulan con sobrepeso. Los usos principales del pesaje en movimiento son el diseño, rehabilitación y mantenimiento de los pavimentos en carreteras; y en el caso de los puentes, al desarrollo de nuevos modelos de cargas vehiculares, conocimiento de los efectos dinámicos de las cargas sobre las estructuras, evaluación de los puentes y control activo de las cargas que circulan por los puentes. Cuando se trata del cumplimiento de la normativa referente al Peso Bruto Vehicular (PBV), el pesaje dinámico es una herramienta útil para hacer una primera preselección de vehículos con sobrepeso y para un control efectivo de cargas de vehículos; en cuanto a la gestión del tránsito, permite realizar una clasificación vehicular (en torno a 15 tipos de vehículos desde el automóvil hasta el doble articulado) y proporciona información sobre el estado de la carga de los vehículos (por eje, por llanta y total) y también es un apoyo para la realización de estudios económicos y de autotransporte. En la Figura 4 se muestra un esquema típico de un pesaje dinámico en una carretera de dos carriles.
Figura 4 Esquema típico de los equipos para realizar un pesaje dinámico
Las normas que se utilizan internacionalmente como referencia para el pesaje dinámico son la norma estadounidense ASTM E 1318 [ASTM, 2009] y la norma europea COST 323 [COST 323, 1999]. La primera es una norma que auxilia al operador y al proveedor en la adquisición, instalación, calibración, pruebas, operación y mantenimiento de un sistema de pesaje en movimiento de manera satisfactoria en un sitio seleccionado; en ella se describe un método de prueba para evaluar el comportamiento de un sistema de pesaje de vehículos en movimiento de acuerdo a la clasificación por Tipos (I, II, III y IV). El método menciona el procedimiento para ejecutar una prueba de aceptación, independientemente del tipo de sistema de pesaje; y describe el proceso de calibración inicial en el sitio para asegurar el buen desempeño y el uso adecuado. La norma europea incluye temas como la definición de las clases de sistemas de pesaje dinámico, los requisitos mínimos de precisión para cada clase, las condiciones del sitio para la instalación del sistema, el establecimiento de procedimientos de calibración y la definición de los métodos de ensayo para el control del sistema. Hoy en el mercado, los sensores de peso y dimensiones deben detectar y registrar información de los vehículos que circulan por una carretera. Los datos son: hora y día, carril de circulación, clasificación del vehículo, número de ejes, peso por rueda, peso por eje, peso por grupo de ejes, peso bruto vehicular, dimensiones, distancia entre ejes, velocidad, así como inconsistencias (p. ej. eje levantado). Para cada dato, se alimenta al sistema con ciertos rangos especificados en la normatividad. En síntesis, el sistema funciona de la siguiente manera: el lazo inductivo detecta la presencia del vehículo y mide su longitud, el sensor mide el peso y la velocidad del vehículo por eje y el espaciamiento entre ellos, de acuerdo a los niveles de precisión solicitados. Además, el sistema debe clasificar a los vehículos y contar con salidas para adicionarle el equipo que obtiene la evidencia multimedia, por ejemplo: el sistema para el Reconocimiento Automático de Placas Vehiculares ANPR (siglas en inglés de “Automatic Number Plate Recognition”). Éste funciona mediante la captura de una imagen del vehículo con una cámara de video, la cual se procesa mediante software y algoritmos de reconocimiento óptico de caracteres, obteniendo una serie alfanumérica correspondiente a la placa frontal del vehículo. Algunos sistemas también toman la placa trasera para confirmar el registro. La cámara de video debe ser de alto desempeño para uso rudo en exteriores, con parámetros necesarios de resolución, calidad, alcance, un mínimo mantenimiento y funcionamiento durante día y noche. Los criterios que rigen la selección de los sitios son tres: la geometría de la carretera, las características del pavimento y los requerimientos particulares para el caso de puentes. El diseño geométrico es un factor importante debido a la influencia longitudinal y transversal que las desviaciones tienen sobre el desempeño del vehículo. Los criterios básicos al respecto son: (I) la curvatura horizontal del carril de la carretera debe tener un radio mayor a 1,000 m, medidos a lo largo de la línea central del carril; (II) la pendiente longitudinal de la superficie de la carretera en el sitio no debe exceder del 1% para Clase I y 2% para las otras Clases; (III) la sobreelevación de la superficie de la carretera en el sitio, no debe exceder del 3% y; (IV) la anchura del carril pavimentado de la carretera debe estar comprendido entre 3 y 4.5 m. Las condiciones del pavimento tienen una influencia directa en la reducción del ‘rebote’ de los vehículos, ya que incrementan las variaciones en la carga por eje. El criterio utilizado establece que en una distancia de 60 metros antes y 30 m después del sistema de medida, la superficie "deberá mantener una condición tal que un disco de 150 mm de diámetro y de 3 mm de espesor no pueda pasar por debajo de una regla de 3 m apoyada en la superficie de la calzada, perpendicular y paralelamente a la dirección del tránsito en el carril". Las hendiduras o surcos deben ser menores de 3 mm a todo lo ancho del carril, con relación a una regla de 3 m apoyada en la calzada [ASTM, 2009 y COST 323, 1999]. Por otra parte, es requisito indispensable que el marco normativo indique que estos dispositivos son válidos para determinar el PBV y en caso de presentar un exceso en el peso o dimensiones los propietarios de las unidades sean sancionados. En el estudio piloto, la metodología seguida para ubicar los sitos más recomendables para la instalación de las estaciones fijas automatizadas para el control de peso y dimensiones de vehículos fue el análisis estadístico del peso y dimensiones de las unidades circulantes por las principales carreteras de acceso a la Ciudad de México (autopistas México-Querétaro, México-Puebla, México-Cuernavaca, México-Toluca y México-Tizayuca y el tramo libre de la carretera México-Toluca). Adicionalmente, se consideraron las recomendaciones internacionales sobre las condiciones óptimas de un sitio para instalar una estación fija de control de peso y dimensiones para vehículos en movimiento. Posteriormente, a partir de esa experiencia, se realizó una primera propuesta de la ubicación de las estaciones automatizadas para el control de peso y dimensiones de los vehículos de carga que circulan por la RCF. Dentro del análisis, se identificaron los sitios en donde se pudiera captar el mayor número de vehículos con sobrepeso procurando que estas unidades no pudiesen evadir la estación de control para cada una de las carreteras seleccionadas que ingresan a la Ciudad de México, así como evitar que se instalen cerca de la zona metropolitana. A continuación se presentan los cuatro sitios seleccionados: 1. Autopista México-Querétaro, km 90+050, ambos sentidos 2. Autopista México-Puebla, km 36+000, ambos sentidos 3. Carretera México-Toluca libre, km 35+900, ambos sentidos 4. Carretera México-Pachuca libre, km 63+000, ambos sentidos El principal beneficio será una aplicación efectiva de las normas existentes de tránsito y operación del transporte, específicamente de velocidad de los vehículos y peso y dimensiones de los vehículos pesados circulando por Carreteras Federales. Con la instalación de estos sistemas, se obtendrá una reducción del número y severidad de los accidentes ocasionados por el exceso de velocidad, así como por el exceso de peso y dimensiones de los vehículos pesados.
Referencias · ASTM, 2009. Standard Specification for Highway Weight-in-Motion (WIM) Systems with User Requirements and Test Methods, Washington, D.C., EE.UU. · COST 323, 1999. Weight-in-Motion (WIM) of Road Vehicles, Reporte Final, Apéndice, Comunidad Europea, Version 3.0 · Cuevas C. et al. 2013. Anuario Estadístico de Accidentes en Carreteras Federales, 2010, Documento técnico 51, IMT, Querétaro, México · ONU, 2010. Decade of Action for Road Safety 2011-2020, Declaratoria de la Asamblea de la Organización de las Naciones Unidas, Washington DC, EE.UU. · SAADA, 2010. Bases de datos de accidentes 2008 generadas en el sistema SAADA, IMT, Querétaro, México · SAADA, 2011. Bases de datos accidentes 2009 generadas en el sistema SAADA, IMT, Querétaro, México · SAADA, 2012. Bases de datos de accidentes 2010 generadas en el sistema SAADA, IMT, Querétaro, México · Sibylle B. et al, 2012. La velocidad en la operación segura de una carretera, Núm. 17, Revista Vías Terrestres, AMIVTAC, Ciudad de México, México
MENDOZA Alberto |