|
||||||||||
|
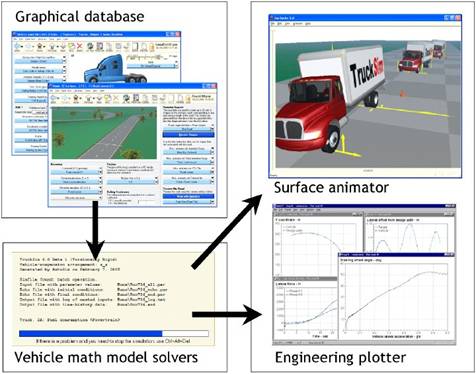
Introducción La comprensión de la interacción entre los distintos factores que componen el sistema de transporte, el vehículo, el conductor, la infraestructura y el entorno, incide directamente en la seguridad vial. El conocimiento adecuado de la interrelación de estos factores da lugar a una correcta operación de un vehículo, preparando o anticipando acciones que permitan mantener la seguridad durante su tránsito. La conducción implica una armonía entre conductor y vehículo, compatible con la infraestructura y el entorno que envuelve el espacio de conducción. El vehículo es un sistema complejo cuyo comportamiento resulta de la correspondencia mecánica entre sus diversos componentes, dispositivos y sistemas. No obstante, de manera frecuente el usuario común desconoce las características de ese comportamiento, promoviendo mayores riesgos durante su tránsito. Las acciones de avance, detención y control direccional, son habitualmente dependientes del conductor. Éste considera su percepción del medio y la interacción del vehículo con la infraestructura. El usuario con conocimiento técnico toma ventaja de las capacidades del vehículo para reaccionar debidamente y decidir la maniobra necesaria y su ejecución. La determinación de las capacidades del vehículo requiere de una evaluación detallada de su comportamiento, tanto estático como dinámico. No obstante, es común que las propiedades estáticas de los vehículos sean extrapoladas hacia las dinámicas, introduciendo diferencias que pueden resultar en comportamientos inesperados,[1]. Para facilitar las tareas de evaluación del desempeño mecánico de los vehículos, se han desarrollado diversos programas computacionales especializados en la simulación del comportamiento y la respuesta dinámica. Aunque concebidos académicamente, la evolución de sus algoritmos y su apego al comportamiento real de vehículos con base en la validación experimental extensa, ha dado lugar a su utilización comercial. Aquí se describen las generalidades de un programa comercial de simulación de ese tipo, utilizado en estudios de dinámica vehicular en el Instituto Mexicano del Transporte. Aunque estos programas no sustituyen la experimentación, son un medio complementario a los procesos de análisis del comportamiento de los vehículos durante su movimiento, especialmente los utilizados para el transporte de carga pesada. Inicios de la modelación de vehículos Desde la construcción del primer vehículo autopropulsado en 1769, se han ideado diversas formas para analizar su comportamiento y, con ello, obtener las mayores ventajas de su uso. No obstante, los estudios formales se dieron a inicios del siglo pasado, los cuales fueron gradualmente detallados a medida que se desarrollaban nuevas técnicas de análisis para los distintos componentes, principalmente la dirección, la fuente de potencia y las llantas neumáticas, [2]. El desarrollo de los vehículos de carretera ha tenido su auge en las últimas décadas, favorecidas por las innovaciones obtenidas de los desarrollos tecnológicos. Aunque los automóviles de pasajeros han reflejado de manera preponderante la evolución en ese campo, los vehículos pesados han facilitado enormemente el movimiento de grandes cantidades de carga, con mayor evidencia a partir de la década de los 80’s, [3]. La importancia que tomaron los vehículos de carga pesada y sus efectos debidos al movimiento, resaltaron la preocupación por incrementar los niveles de seguridad durante su tránsito por carretera. Este propósito dio origen al interés de evaluar de manera precisa el desempeño de vehículos pesados, dándose los primeros intentos por la Asociación de Transporte Carretero de Canadá en 1984, quien patrocinó el Estudio Canadiense de Pesos y Dimensiones de Vehículos,[4] . De resultados de pruebas experimentales y del apoyo de la simulación por computadora, se propusieron en ese país bases técnicas para una reforma regulatoria de pesos y dimensiones de ese tipo de vehículos. Posteriormente, extendiendo los alcances de estudios similares, el University of Michigan Transportation Research Institute (UMTRI) propuso un conjunto de medidas de desempeño que guiaran el desarrollo de evaluaciones y regulaciones de diversas configuraciones vehiculares de carga pesada. Estas medidas se fundamentaron en la evaluación precisa de la estabilidad vehicular, la tendencia a la volcadura y la respuesta direccional, como parte del comportamiento dinámico de vehículos,[4] . Los estudios realizados en ese entonces, fueron sustentados con un modelo de simulación denominado “Yaw-Roll”, cuyo programa computacional de referencia fue desarrollado por el UMTRI. El modelo de simulación teórico-numérico del comportamiento dinámico de vehículos pesados supone que el vehículo se desplaza a una velocidad de avance constante, cuyas ecuaciones se resuelven en el dominio del tiempo,[5] . Esencialmente, este modelo es utilizado para analizar combinadamente la respuesta de coleo y balanceo de vehículos unitarios y multiarticulados, durante maniobras de conducción en condiciones dinámicas que se aproximan al límite de volcadura. El modelo de simulación “Yaw-Roll” ha conformado la base de otros programas de simulación, cuyas características resultantes involucran capacidades de visualización adicionales. Así mismo, programas comerciales presentan a mayor detalle las características y propiedades físicas de los vehículos pesados, del conductor, de la infraestructura y del entorno físico. Las sofisticaciones de estos desarrollos incluyen la modelación de otros tipos de vehículos de carretera, como autobuses, automóviles y motocicletas, así como sistemas avanzados de control direccional y la interacción entre ellos, como en el caso de colisiones. El programa de simulación TruckSim® TruckSim® se constituye como una herramienta computacional para analizar el comportamiento dinámico de camiones medianos y pesados, así como de autobuses y combinaciones vehiculares articuladas de carga,[6] . En términos generales, el programa muestra cómo responde dinámicamente un vehículo ante entradas provenientes del conductor y del entorno inmediato. En su lanzamiento al mercado en la década de los 90’s, el TruckSim® fue identificado como el primer paquete de software que combinaba modelos dinámicos de vehículos pesados altamente detallados, con una moderna interfase gráfica. El programa se compone de cuatro elementos básicos principales, indicados en la Figura 1. Estos componentes son la interfaz gráfica, el modelo matemático y su solución, la visualización animada y el despliegue técnico de resultados.
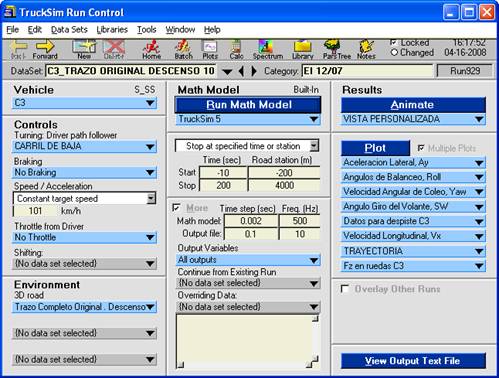
El primer componente es una interfaz que administra una amplia base de datos del modelo. Esta base de datos permite visualizar la relación entre cada uno de los parámetros introducidos y su ubicación física en el complejo sistema mecánico del vehículo. Permite también la definición de las características del entorno, como la carretera, los parámetros de operación del vehículo y la simulación, en su caso, de algunas acciones del conductor traducidas a efectos geométricos o mecánicos. El segundo componente vincula la base de datos con el modelo matemático del vehículo elegido y resuelve numéricamente las ecuaciones matemáticas correspondientes. A partir de la solución, genera los datos necesarios para que pueda ser ejecutada la animación visual a través del tercer componente, o la presentación gráfica de los resultados con el cuarto componente. Para la animación visual los datos son exportados al programa SurfAnim, mientras que la generación de resultados gráficos se realiza a través del programa WinEP, [6, 7]. Estos cuatro componentes son controlados por medio de la pantalla principal, mostrada en la Figura 2. Esta pantalla indica gráficamente el acceso a cada uno de los elementos del programa, incluyendo el acceso a parámetros de control de la corrida de simulación.
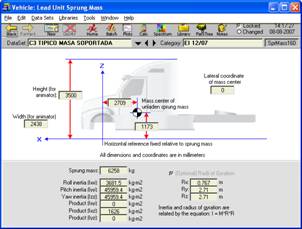
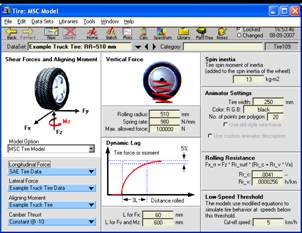
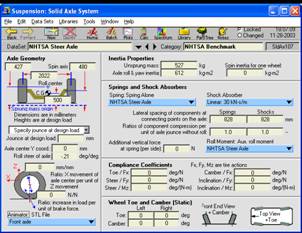
Para el proceso de modelación, el programa requiere de la introducción estructurada de parámetros asociados al vehículo, a la carretera y algunos aspectos del entorno. Estos parámetros se obtienen de las propiedades preponderantemente geométricas y mecánicas de los diferentes sistemas, que emulan las condiciones de la simulación. La introducción de dimensiones y propiedades se realiza de acuerdo a cada componente que participa en la definición del comportamiento del vehículo, desplegado en ventanas interactivas, como se muestra en la Figura 3. Propiedades con características variables pueden ser introducidas de manera tabular.
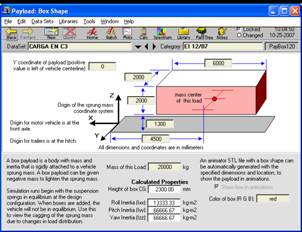
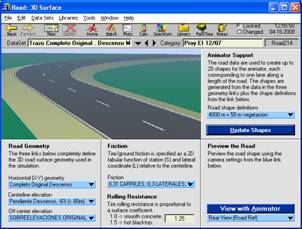
De manera similar, la geometría y propiedades de la superficie del camino se introducen en ventanas como las mostradas en la Figura 4.
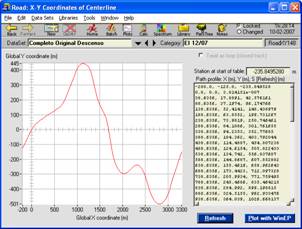
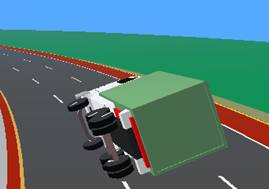
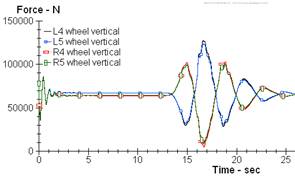
Una vez integrados todos los parámetros del modelo y de la simulación, se ejecuta la corrida, resultando cientos de variables emitidas como historias de tiempo, útiles para análisis, inspección y animación. Particularmente útiles son las historias de variables como aceleración y fuerzas, como se ejemplifica en la Figura 5.
Aunque sobre el modelo del vehículo representado se tienen puntos específicos para registrar las variables resultantes del movimiento, la simulación en el programa permite definir puntos particulares de interés. Esto significa que algunas variables pueden ser adaptadas para indicar el mismo tipo de salidas que se obtendrían por instrumentos y sensores durante el desarrollo de pruebas experimentales en un vehículo real instrumentado, [7]. Esta modalidad facilita la comparación y validación de las simulaciones respecto a la ejecución de pruebas reales, minimizando los errores atribuibles al cambio de puntos de referencia entre modelo y vehículo de prueba. Consideraciones El conocimiento y entendimiento de la forma en que los vehículos se comportan y responden de acuerdo a sus capacidades durante su operación, es vital para utilizarlos de manera adecuada. El uso apropiado e integrado al resto de los elementos de un sistema de transporte, redundará en un tránsito más seguro. Tanto las labores experimentales como de simulación son necesarias para alcanzar ese conocimiento. Aunque los programas de simulación cuentan con bases de datos básicos de geometrías y propiedades de algunos vehículos típicos, la diversidad de vehículos de transporte requiere que se introduzcan datos fidedignos asociados al tipo de vehículo bajo análisis. Para mayor congruencia del comportamiento real con el simulado y de acuerdo a los alcances de un estudio, es necesario realizar mediciones experimentales de sistemas y componentes principales en laboratorio y/o en campo, que representen las particularidades individuales del vehículo estudiado, cuyas desviaciones y errores puedan ser minimizados al usar el modelo correspondiente. Como sucede a menudo con la aplicación de modelos de simulación teórico-numéricos, es posible ejecutar corridas de simulación de vehículos bajo condiciones de prueba que serían difíciles y costosas de llevar a cabo en un experimento a escala real. Permite, en este sentido, extender los alcances de análisis complementando con la simulación maniobras y acciones de alto riesgo que demandarían y excederían las capacidades mecánicas y de respuesta del vehículo de prueba. FABELA Manuel [1] Fabela Gallegos, M. J.; Vázquez Vega, D.; Hernández Guzmán, A.; Hernández Jiménez, J. R.; Orozco Orozco, P. R. "Comportamiento dinámico de vehículos terrestres". Artículo 3, Boletín Notas No. 62. Instituto Mexicano del Transporte. Sanfandila, Qro. Enero-Febrero 2002. [2] Gillespie, T. D. “Fundamentals of Vehicle Dynamics”. Society of Automotive Engineers, Inc. Warrendale, PA, USA. 1992. [3] Fitch, J. W. “Motor Truck Engineering Handbook”. 4th Edition, ISBN 1-56091-378-9, Society of Automotive Engineers, Inc. MA, USA. 1994. [4] El-Gindy, M. “An Overview of Performance Measures for Heavy Commercial Vehicles in North America”, Int. J. Of Vehicle Design, 16, pp. 441-463, 1995. [5] Gillespie, T. D. and MacAdam, C. C. “Constant Velocity YAW/ROLL Program User´s Manual”, The University of Michigan Transportation Research Institute, U.S.A. October, 1982. [6] Mechanical Simulation. TruckSim Program. http://www.carsim.com/products/trucksim. Mechanical Simulation Corporation. Consultada en Marzo de 2009. [7] TruckSim. User Manual Update. Version 5.04. Mechanical Simulation Corporation. June 2003.
|