|
|||||||||||||||||||||||||
Introducción Es común que vehículos de grandes dimensiones se califiquen con problemas de baja maniobrabilidad. Esto significa que estos vehículos tengan dificultad para posicionarse en espacios reducidos. En este sentido, la maniobrabilidad se refiere a la capacidad del vehículo para ejecutar cambios de posición o dirección y la facilidad para realizarlos, asociando, por tanto, espacios y movimientos necesarios en la operación del mismo. Para tomar ventaja de mayores volúmenes de transporte por carretera, es común utilizar combinaciones vehiculares articuladas, cuya composición de unidades tractiva y una o varias de arrastre, les confiere, además, grandes longitudes. Las unidades en la combinación se conectan a través de mecanismos de soporte y articulación comúnmente del tipo “quinta rueda”, como la mostrada en la Figura 1.
La configuración geométrica resultante de estas combinaciones, así como la magnitud de las dimensiones y del peso asociado, repercuten en una pobre maniobrabilidad. Para su operación, estos vehículos requieren de espacios amplios y/o de mecanismos que faciliten sus cambios de dirección, cuyas dificultades se agudizan en la ejecución de maniobras a baja velocidad. Tal es el caso de las operaciones en patios de carga y descarga que, además, implican movimientos de reversa, en el que el empuje a la unidad remolcada presenta mayor complejidad en la ejecución de la maniobra. Como consecuencias negativas de los ejes de arrastre por pobre maniobrabilidad en combinaciones vehiculares, se cuentan el incremento del desgaste de las llantas y deterioro del pavimento, despistes considerables, alta resistencia al desplazamiento de avance del vehículo y otros efectos negativos sobre el control direccional, [1, 2]. Estos efectos son potencialmente mayores cuando la unidad de arrastre posee varios ejes, requiriéndose mayor energía en el seguimiento de trayectorias con radios pequeños. Para atender la necesidad de mejorar la maniobrabilidad de vehículos de este tipo, se han ideado mecanismos que apoyan el direccionamiento de las unidades remolcadas, como es el caso de ejes direccionables o “elevables”, [3]. Sin embargo, su aplicación requiere aún del conocimiento del comportamiento de las unidades al introducir estas capacidades en ejes de carga. Con el propósito de contar con un medio experimental para el estudio de la maniobrabilidad de combinaciones simplemente articuladas, se presenta un semirremolque de laboratorio, cuya características principal es la capacidad direccional en su único eje. Además, con algunas adaptaciones permite ser acoplado a un vehículo ligero tipo pick up para seguimiento de trayectorias de prueba. Descripción del semirremolque En la construcción y preparación del semirremolque se consideraron algunos requisitos que facilitaran el posterior estudio del comportamiento, como la inclusión de un solo eje con capacidad direccional. Debido a las características de prototipo, el control de la orientación de las llantas (direccionalidad) se estableció que fuera manualmente. A esto se agregó una estructura simple, con capacidad de ser acoplado a través de un mecanismo de articulación a una camioneta tipo pickup. Desde el punto de vista cinemático, como configuración compuesta de dos unidades y una articulación, además del ángulo de articulación de la combinación se identificaron como importantes los ángulos de dirección en el eje del semirremolque y en el de la camioneta como unidad tractiva. Así mismo, como medio de obtener de manera indirecta el ángulo de articulación, se consideró el análisis de la velocidad angular de cada unidad. Un esquema de la combinación indicando estas variables se muestra en la Figura 2.
La estructura con características apropiadas para la construcción del semirremolque fue satisfecha por la parte delantera de un automóvil sedán, incluyendo el eje direccional. Esta estructura fue adaptada para alojar un operador de la dirección, así como para ser conectada a la camioneta para su arrastre. Correspondientemente, sobre la caja de la camioneta pickup se adaptó una estructura base con una articulación esférica. Esta estructura se situó al centro del eje trasero de la camioneta. En la Figura 3 se muestra la estructura del semirremolque y la estructura del acoplamiento en la camioneta.
Una vez ajustados los elementos de conexión, se armó la configuración como se muestra en la Figura 4. En la figura se muestra también las principales dimensiones de la combinación.
En las dimensiones resultantes se consideró obtener una proporción similar con combinaciones actuales de tractocamión-semirremolque. Esta proporción sugiere que se pueda proveer información para deducir el comportamiento de combinaciones reales. Instrumentación típica Para obtener registro de las variables angulares de interés, se colocaron distintos instrumentos en puntos definidos sobre ambas unidades. Para la medición de los ángulos de la dirección del semirremolque y de la camioneta se diseñaron instrumentos con principios de operación simple, utilizando potenciómetros eléctricos. Estos instrumentos, debidamente adaptados para su fijación, se colocaron en algunos elementos de los respectivos mecanismos de dirección en semirremolque y camioneta. Para medir el ángulo de la articulación en el acoplamiento entre semirremolque y camioneta, se utilizó un sistema redundante, consistente uno de ellos en un instrumento similar a los utilizados para la medición del ángulo de dirección. Por sus características, este medidor debió fijarse de manera que estuviera alineado con el eje vertical del punto de articulación. Un segundo sistema consistió en utilizar medidores de velocidad angular, colocados uno en la camioneta y otro en el semirremolque. Dadas las características de este sistema, para su operación de medición y registro sólo es condición necesaria que se ubiquen en alguna parte de la estructura de una y otra unidad. El ángulo de articulación se obtiene entonces por integración de la señal de la velocidad con respecto al tiempo. Con el propósito de obtener algunos otros indicadores durante la ejecución de pruebas que pudieran resultar en información complementaria sobre el desempeño de ambas unidades, se utilizaron también algunos instrumentos para medir aceleración, principalmente en la dirección transversal. En la Figura 5 se muestran algunos aspectos generales de la instrumentación y de los dispositivos utilizados.
Los instrumentos utilizados fueron parte de un esquema de adquisición de datos, obteniendo señales eléctricas cuya magnitud es proporcional a los cambios de las variables físicas de interés. Los datos, de esta manera, pueden almacenarse en una computadora, utilizando en este caso un par de computadoras portátiles. Debido a que el semirremolque fue construido con la intención de realizar pruebas a muy baja velocidad, para facilitar el seguimiento preciso de trayectorias curvas de prueba, se utiliza una cámara miniatura de video digital, colocada al frente de la camioneta. En cuanto al seguimiento, la trayectoria es referenciada por medio de marcas en la defensa delantera directamente bajo la cámara, como se muestra en la Figura 6. La imagen de video se despliega entonces en el monitor de una de las computadoras portátiles, que se colocan en el interior de la cabina de la camioneta.
Debido a las dimensiones de la camioneta, el punto de visualización de la cámara se ubica al frente del centro del eje direccional, a una distancia de 0,95 m. Este punto garantiza el seguimiento visual inmediatamente frente a la camioneta, permitiendo al conductor hacer los ajustes de dirección de manera inmediata. Prueba del semirremolque y de la instrumentación Para verificar el tipo y calidad de información que pudiera obtenerse con el conjunto camioneta-semirremolque de prueba y la instrumentación utilizada, se trazaron en el piso diversas trayectorias para su seguimiento. Estas trayectorias comprendieron curvas circulares de 90°, así como la ejecución de maniobras de slalom. El seguimiento de círculos y curvas se realizó a velocidades alrededor de 3 km/h, mientras que las maniobras de slalom se ejecutaron aproximadamente a 8 km/h. Esta última velocidad fue resultante de la operación de la camioneta con el motor en ralentí. Con fines de comparación, las pruebas consideraron dos casos de ejecución, manteniendo fijo el eje direccional del semirremolque, como es el caso común, y habilitando su capacidad de ajuste manual, es decir, con orientación móvil. En la Figura 7 se presentan diversas etapas de esas pruebas.
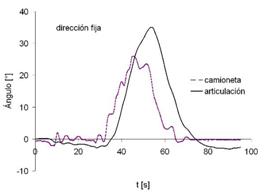
Como resultado de estas pruebas de verificación, se obtuvo principalmente información sobre el ángulo de articulación, comparado con el de dirección de la camioneta. Además, para la maniobra de slalom se tuvieron registros de la aceleración lateral en el eje del semirremolque y la velocidad angular para ambas unidades. En la Figura 8 se presenta un ejemplo de resultados típicos de las pruebas de seguimiento de la curva de 90° de 9,5 m de radio. En la figura se comparan las condiciones de eje del semirremolque con dirección fija y de dirección móvil. Para alineamiento longitudinal previo de camioneta y semirremolque a la trayectoria de seguimiento, ésta incluyó tramos rectos al inicio y final de la curva, de 20 m cada uno.
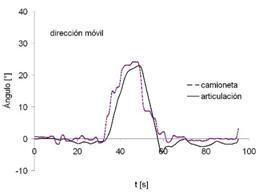
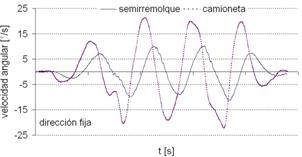
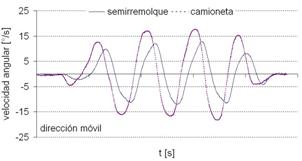
Como observación preliminar, es evidente que en el caso de mantener la dirección bloqueada en el eje del semirremolque, el ángulo de articulación que se genera durante el seguimiento de la curva alcanza valores mayores que el introducido en el eje direccional de la camioneta. Por otro lado, con el eje direccional del semirremolque habilitado (dirección móvil), el ángulo de articulación en la articulación alcanza valores similares a los de las llantas direccionales de la camioneta. Como la camioneta entra primero a la curva, los valores pico muestran un corrimiento hacia delante con respecto al de la articulación. Con respecto a las pruebas del comportamiento de la combinación en la maniobra de slalom, se colocaron conos separados entre sí 10 m. Para restringir el espacio de maniobra, se utilizó una calzada de 7 m de ancho, colocando longitudinalmente los conos en la línea central. Como ejemplo de resultados de esa maniobra, en la Figura 9 se presenta el comportamiento de la velocidad angular para uno y otro caso, con el eje del semirremolque con dirección fija y móvil, respectivamente.
Como puede notarse, con el eje del semirremolque fijo se observa una menor velocidad angular que cuando es direccionalmente ajustable. No obstante, la velocidad de la camioneta es mayor en la primera condición, debido básicamente a que requiere de mayor desplazamiento y giro para obligar al semirremolque a evadir los conos. Aunque con la capacidad direccional del semirremolque se incrementa la velocidad angular, los niveles para la camioneta disminuyen significativamente, indicando que su demanda para orientar al semirremolque es también menor. Este tipo de pruebas y sus resultados, muestran que el semirremolque, con la instrumentación indicada, puede ser utilizado para determinar las demandas de espacio durante maniobras a baja velocidad como combinación articulada. Conclusiones Las pruebas de funcionalidad del semirremolque, mostraron algunos resultados de utilidad en términos del comportamiento de la combinación en maniobras simplificadas de seguimiento de trayectorias curvas. En su modalidad actual de eje direccionalmente fijo, el ángulo de articulación es mayor que el ángulo de orientación de las ruedas direccionales del vehículo tractivo. En contraparte, en la modalidad de eje virable, el ángulo de articulación es similar al de la dirección de la unidad motriz. Un reflejo de este comportamiento en el espacio requerido para la maniobra implica que con el eje fijo haya una mayor invasión de la zona interna a la curva, mientras que si tiene capacidad direccional, la invasión se reduce. Debido a que las unidades remolcadas demandan mayores ajustes en la dirección de la unidad tractiva para su alineamiento en una maniobra a baja velocidad, la introducción de ejes virables en estas unidades es una alternativa que puede ser considerada. No obstante, se requiere tener un conocimiento adecuado del desempeño en la maniobrabilidad de las combinaciones articuladas y multiarticuladas. El uso de un semirremolque de prueba instrumentado para determinar el efecto del desalineamiento y la invasión de espacios durante maniobras a baja velocidad, es útil en el estudio para mejorar la productividad de las combinaciones articuladas de carga. El conocimiento del comportamiento de la maniobrabilidad permitirá ubicar estrategias aplicables a las combinaciones articuladas, como es el caso de ejes virables en los ejes de carga. * Referencias 1. Edgar, J. “Development of performance standards for Australian heavy vehicles”. National Transport Commission. Australia. 2006. 2. Coleman, B.; Sweatman, P. “Steerable axles to improve productivity and access”. Australia. National Road Transport Commission. Australia. 2002. 3. Luo, S. “Relative Performance Analyses of Articulated Vehicles with Multiple Conventional, Liftable and Self-steering Axles”. M. A. Sc. Thesis. Concordia University. Canada. 2005. FABELA Manuel Glosario: Configuración vehicular articulada: Combinación de una unidad motriz direccional, y una o varias unidades de arrastre, conectadas secuencialmente a través de acoplamientos articulados. Ejemplo, combinación de tractocamión y semirremolque, unidos por medio de una quinta rueda. Maniobrabilidad: Capacidad de un vehículo para ejecutar cambios de posición o dirección y la facilidad para realizarlos, atendiendo los espacios y movimientos necesarios para su operación. Potenciómetro: Componente electrónico pasivo, capaz de cambiar su resistencia eléctrica. Velocidad angular: Velocidad de rotación de un cuerpo con respecto a un punto o un eje, implicando, por tanto, un continuo cambio en su orientación.
|