|
|||||||||||||
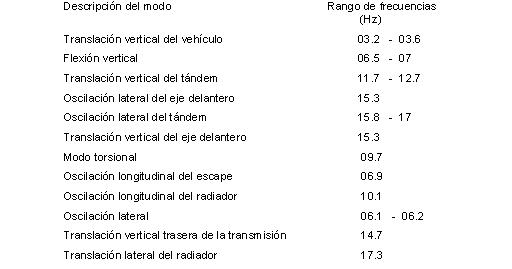
Introducción El comportamiento dinámico de los vehículos pesados se caracteriza por los distintos modos en que las masas de estos equipos pueden vibrar, y que incluyen, tanto desplazamientos lineales como angulares. Las angulares comprenden la oscilación de las distintas masas de los vehículos alrededor de sus ejes longitudinales, transversales y verticales. Mientras que las oscilaciones alrededor de los ejes vertical y transversal se asocian, respectivamente, con la estabilidad direccional y la transferencia longitudinal de carga durante el frenado; la oscilación alrededor del eje longitudinal, denominada en este trabajo oscilación lateral, se asocia con la tendencia a la volcadura de los vehículos pesados. De esta forma, la magnitud de la oscilación lateral representa la variable más importante para establecer la estabilidad lateral o tendencia a la volcadura de los vehículos pesados. La causalidad para la oscilación lateral de los vehículos se deriva de perturbaciones tanto externas como internas. Las externas provienen ya sea de las maniobras direccionales que los vehículos efectúan (durante su operación normal o en situaciones de emergencia), o por parte de las irregularidades presentes en los pavimentos. Otras perturbaciones externas son las ráfagas, que se presentan bajo determinadas circunstancias. Las internas provienen de la vibración de los componentes del vehículo, incluyendo el tren motriz, las llantas y la carga misma. En este artículo se presenta un estudio de la causalidad para la oscilación lateral de los vehículos, incluyendo a las perturbaciones internas y externas, a través de análisis teóricos y experimentales. Tipificación de las pertubaciones laterales de vehículos pesados del pavimento Las propiedades de masa y rigidez de los componentes de los vehículos establecen los grados de libertad que estos equipos poseen en conjunto. Asimismo, las perturbaciones que excitan los distintos grados de libertad de los transportes pueden originarse de distintas maneras, ya sea internamente desde la propia unidad, o externamente como producto de la interacción del vehículo con la infraestructura carretera y el ambiente. En cuanto a las fuentes de perturbación externas al vehículo, provienen fundamentalmente de la interacción de los vehículos con la infraestructura y el medio ambiente, así como de perturbaciones direccionales y de cambio de velocidades por el conductor. En el caso de pavimentos, se considera que el perfil de éstos provoca la vibración de los elementos del vehículo. Por cuanto al ambiente, las corrientes de aire pueden afectar el estado dinámico del transporte, al ejercer fuerzas laterales sobre estos (Gillespie, 1985), los cuales a su vez tienen distintas fuentes de perturbación internas, como las derivadas del tren motriz (motor y transmisión), de la rotación de las llantas, o del movimiento de la carga (Romero, 2002). Por su parte, las perturbaciones derivadas de la propia conducción, representan aceleraciones laterales o longitudinales ejercidas sobre las distintas masas de los vehículos, por lo que el estado de vibración es una composición compleja de respuestas dinámicas de los distintos componentes de los vehículos a perturbaciones, tanto internas como externas. Características de las perturbaciones del pavimento La rugosidad del pavimento provoca la vibración del vehículo tanto de manera vertical como de oscilación lateral. La perturbación de la oscilación lateral se debe a la diferencia en los perfiles de las dos pistas de rodadura. Esto es, en condiciones de perfecta simetría de las propiedades de rigidez y de masa del vehículo a ambos lados de su eje longitudinal, una perturbación idéntica en ambas pistas de rodadura de la carretera (izquierda y derecha, o interna y externa), implicaría una nula oscilación lateral del vehículo. Causalidad interna para la oscilación lateral de los vehículos A continuación, se describen algunas fuentes de perturbación de la oscilación lateral, derivadas del comportamiento de los distintos elementos que componen los vehículos. Perturbaciones por las ruedas Las perturbaciones provocadas por las llantas se atribuyen fundamentalmente a fallas de ovalamiento o balanceo, y por la falta de concentricidad y uniformidad en las propiedades de rigidez de las partes ensambladas en las ruedas (Gillespie, 1985). El desbalanceo de las ruedas perturba la oscilación lateral, al representar fuerzas que se transmiten al cuerpo del vehículo a través de los elementos de la suspensión. A cada extremo de cada eje se puede presentar entonces una perturbación síncrona. El efecto global del desbalanceo de las ruedas es función del ángulo de fase entre los puntos pesados en cada rueda, y de la magnitud de estas masas pesadas. La frecuencia de excitación derivada del desbalanceo de las ruedas depende de la velocidad del vehículo y del diámetro de la rueda. Perturbaciones por el tren motriz Se derivan del accionamiento del motor así como de la rotación, tanto de la caja de velocidades como de la flecha del cardán y del diferencial. Mientras que la vibración del motor se produce a distintas frecuencias, la fundamental se asocia a las revoluciones por minuto (rpm) del motor. Otra fuente de vibración se origina por el desbalanceo de la flecha cardan. En cuanto al desbalanceo de la flecha cardán, se considera que ello puede contribuir a la oscilación lateral desde dos puntos de vista: el desbalanceo que causa una fuerza horizontal, y las fuerzas verticales de desbalanceo que provoquen una oscilación lateral del vehículo; al tener éste cualquier falla de simetría longitudinal en sus propiedades dimensionales y de rigidez. Las frecuencias de excitación derivadas del desbalanceo de la flecha cardán son función de la relación de transmisión en el diferencial. Respecto a las perturbaciones derivadas de la operación del motor, sus características quedan definidas por las revoluciones por minuto a las que éste opera, y por el número de pistones que tenga. Mientras que las revoluciones implican vibraciones síncronas a la velocidad del motor, derivadas del desbalanceo de sus distintas masas, el número de pistones incide en el estado de vibraciones torsionales en el tren motriz, que afectan finalmente la tracción en las ruedas motrices (Gillespie, 1985). Para la oscilación lateral del vehículo, se considera que sólo las revoluciones por minuto (rpm) del motor pudieran afectar en alguna medida el estado de oscilación lateral de los vehículos. Perturbaciones por oscilación de cargas líquidas La oscilación de los fluidos líquidos transportados en autotanques, cargados de manera parcial, es susceptible de ejercer fuerzas importantes sobre el cuerpo del vehículo (Ervin, et al, 1985; Rakheja, et al, 1992; Aquaro, et al, 1999; Strandberg, 1978). La frecuencia de las perturbaciones, derivadas de la oscilación de los fluidos, es una función de la forma del tanque y de su nivel de llenado (Strandberg, 1978). Resonancias de los componentes de los vehículos Tomando en cuenta que las distintas perturbaciones descritas ocasionan la respuesta dinámica de las diferentes masas susceptibles de vibrar (masa de los ejes, masa sobre las suspensiones, bastidores y cabinas), en los espectros de vibración de los sistemas de los vehículos se podrían identificar tanto las frecuencias de las perturbaciones como aquellas correspondientes a la respuesta de las masas de las unidades vehiculares. La Tabla 1 ilustra la serie de resonancias que es posible encontrar en los tractores de camiones articulados, de acuerdo con Gillespie (1985). Simulación de la respuesta dinámica de vehículos pesados a perturbaciones laterales Las condiciones de vibración y de estabilidad de los vehículos, dependen de las características de diseño y operación de los mismos. De esta manera, las perturbaciones que inciden en su operación de forma segura, están asociadas a las condiciones de las carreteras por cuanto a sus características físicas y de tráfico. El trazo de la carretera y las irregularidades del pavimento definen entonces un grupo de perturbaciones, asociadas a las aceleraciones laterales aplicadas al vehículo durante el seguimiento del trazo del camino. Tabla 1 Resonancias en los tractores de vehículos articulados
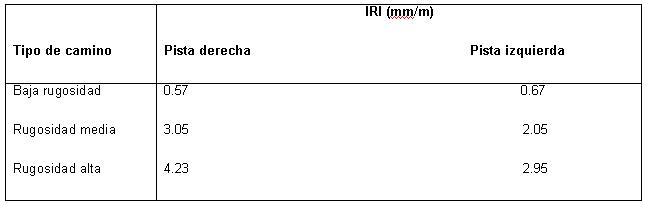
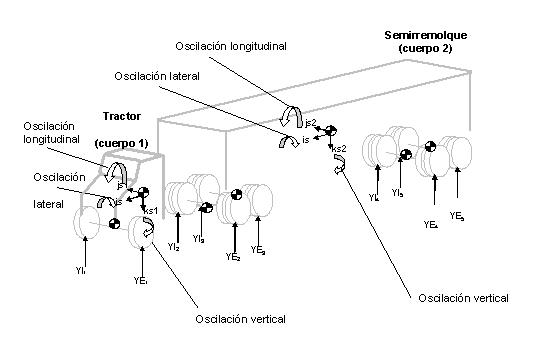
Respuesta del vehículo al perfil del pavimento En seguida, se presenta un análisis espectral de la simulación de la respuesta dinámica de un vehículo articulado al transitar por un camino irregular, donde la pista de rodadura de las ruedas internas es diferente de aquella de las ruedas externas. Esta simulación se realizó con un programa desarrollado en la Universidad Concordia (Raji, 1999; Romero, et al, 2001). La Figura 1, muestra el vehículo considerado en estas simulaciones, el cual consiste en dos cuerpos suspendidos y cinco ejes. En esta figura se aprecian las perturbaciones derivadas de las irregularidades del pavimento, en cada una de las posiciones de las ruedas interiores (YIi) y exteriores (YEi), donde i se refiere al eje del vehículo considerado. Se realizaron un grupo de simulaciones con objeto de identificar las frecuencias dominantes derivadas de la circulación de los transportes sobre pavimentos irregulares. Condiciones para las simulaciones Para las simulaciones se consideran tres perfiles de pavimento, obtenidos de mediciones de campo, a lo largo de las pistas izquierda y derecha, siendo caracterizados estos perfiles de pavimento de acuerdo con el Índice Internacional de Rugosidad, IIR (Romero, 1995). Los números del IIR para cada una de las pistas de rodadura, se ilustran en la Tabla 2. Tabla 2 IIR de los perfiles empleados
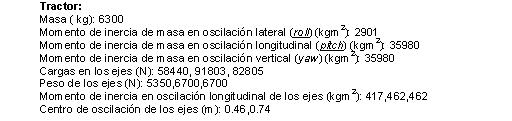
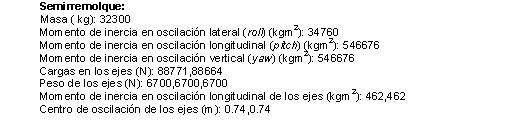
Figura 1 Perturbaciones desde el pavimento sobre el vehículo y oscilaciones de los cuerpos de un vehículo articulado (tractor-semirremolque) Características del vehículo La Tabla 3 muestra las propiedades mecánicas de los cuerpos del vehículo, consideradas durante las simulaciones. Estas características corresponden a una unidad a plena carga. Tabla 3 Propiedades de los cuerpos vehiculares de la combinación tractor-semirremolque
Respuesta del vehículo a maniobras direccionales Se presenta un análisis espectral de la simulación de la respuesta dinámica de un conjunto vehicular tractor-semirremolque a perturbaciones exclusivamente direccionales, al considerar tales maniobras sobre un pavimento perfectamente plano. Para las simulaciones se empleó el programa de simulación yaw-roll, así como las propiedades de los vehículos en la Tabla 3. Maniobras consideradas Se emplean dos maniobras de manejo para el análisis de la respuesta, tanto en el tiempo como en frecuencia, de un vehículo al ser sometido exclusivamente a una perturbación direccional: cambio de carril sencillo y doble cambio de carril. Estas maniobras de manejo medianamente bruscas, se diseñaron específicamente para el análisis de la respuesta direccional de los vehículos pesados (El-Gindy, 1995). Respuestas en el tiempo Los resultados señalan el efecto de ampliación de la oscilación lateral que se presenta en vehículos articulados. De esta manera, el ángulo máximo de oscilación lateral del tractor durante la maniobra es ligeramente menor que el ángulo máximo de oscilación lateral del semirremolque. Análisis espectral de potencia Respecto a los contenidos espectrales asociados al tractor y al vehículo, se presenta para ambas maniobras un componente mayor asociado al semirremolque, lo cual se atribuye a la magnificación derivada de la disposición geométrica de los respectivos cuerpos. Acerca de las magnitudes de los componentes espectrales, se observó que los mayores valores se presentan en el caso de la maniobra de cambio doble de carril. Análisis de la aceleración lateral asociada a maniobras direccionales Los principios de cálculo se aplican al análisis de diferentes maniobras de los vehículos, en particular una maniobra en eslalom y algunas otras que son comunes en recorridos por carretera. De la determinación de los radios instantáneos de curvatura, asociados a una trayectoria dada del vehículo, en la perspectiva de la velocidad del mismo, se definen las aceleraciones laterales y frecuencias de perturbación. El análisis de variación de las aceleraciones laterales, con respecto al tiempo, determina las características de perturbación que representan estas maniobras en la respuesta dinámica de los vehículos, al caracterizar tales aceleraciones por sus frecuencias de excitación, y compararlas con aquellas de oscilación libre, lo que permite establecer la proximidad de las maniobras realizadas a las frecuencias naturales de oscilación lateral de los vehículos. Análisis de maniobras de conducción en carretera Se analiza la perturbación lateral sobre el vehículo, derivada del trayecto sobre una rampa de acceso. El trazo carretero corresponde al segmento que une el boulevard Bernardo Quintana con la Carretera a San Luis Potosí (al provenir desde el parque industrial Benito Juárez); tiene la particularidad de aproximarse estrechamente a un trazo circular, con radio de 45 m. Este dato fue obtenido de mediciones con un sistema GPS. La perturbación direccional, en cuanto a sus características de frecuencia, se obtiene mediante el establecimiento de la variación del volante de la dirección, al efectuar la maniobra descrita en la Figura 2. Análisis experimental en campo Se presenta, también, el desarrollo de pruebas de campo para medir la oscilación lateral de un vehículo tipo autotanque no articulado, cargado a su nivel máximo de trabajo (98%). Recorrido en autopista Incluyó la conducción durante un kilómetro en avenidas y calles de acceso a la autopista, totalizando 25 km del parque industrial Benito Juárez a Sta. Rosa Jáuregui. Esto para cada uno de los recorridos de ida y vuelta.
Figura 2
Diseño geométrico de una rampa de acceso con desnivel (medida en campo con un sistema de posicionamiento global) El de ida se efectuó al 98% de llenado, mientras que el de regreso se efectuó a tanque vacío. Las maniobras en calles se efectuaron a una velocidad entre 40 y 60 km/h, y en la autopista a una velocidad entre 60 y 70 km/h. Instrumentación Se emplearon dos sistemas de captura de información; por un lado se tuvo un equipo de captura y análisis de información (Smartmeter, 1990), cuyo acelerómetro se montó en la parte superior del autotanque (sobre la protección ante volcaduras), empleando para ello la base magnética del mismo transductor. La señal del acelerómetro se capturó y almacenó con el sistema Smartmeter, el cual puede proporcionar resultados tanto en el dominio del tiempo como en el de frecuencia (espectros de 398 frecuencias). Los registros de datos se efectuaron durante las maniobras de interés. De acuerdo con la configuración del equipo, durante cada evento de registro se tomaron 1,024 lecturas, en aproximadamente 4s. El ancho de banda fue de 0 a 100 Hz. La posición absoluta del vehículo se registró mediante un sistema GPS, lo que permitió establecer las trayectorias seguidas durante las distintas pruebas efectuadas. Los registros se obtuvieron a cada segundo. Descripción de resultados y análisis Los distintos espectros de las pruebas en autopista y en patio se promediaron, con objeto de analizar el efecto global de las distintas perturbaciones aplicadas al vehículo. Los resultados promediados se analizaron en la perspectiva de asociar los distintos picos del espectro con las perturbaciones externas e internas presentes, así como las resonancias de los distintos componentes vehiculares. Las pruebas en carretera proporcionaron resultados interesantes, los cuales hicieron evidente la existencia de una perturbación al vehículo, provocada por la oscilación del fluido transportado. Asimismo, los sistemas empleados para localizar la unidad durante su recorrido, proveyeron valiosa información experimental la cual pudiera emplearse para caracterizar las perturbaciones aplicadas al vehículo producto de su tránsito. Esto es, por efecto del uso de un sistema GPS, se contó con información de la velocidad de circulación y de la trayectoria seguida, lo cual permitiría obtener las aceleraciones laterales ejercidas sobre éste, así como las frecuencias de perturbación direccional. Las pruebas de autopista respondieron a dos distintas situaciones de carga del vehículo, lo cual permitió comparaciones interesantes de los fenómenos presentes en estas situaciones. La comparación entre los espectros a vehículo lleno y vacío, proporcionó la prueba inequívoca de la existencia de una perturbación lateral sobre el vehículo, derivada de la oscilación lateral del fluido en el interior del tonel del autotanque. Un aspecto cuya atención hubiese sido deseable en el desarrollo de las pruebas en autopista, que resultó imposible de realizar por limitaciones logísticas, se refiere a la circulación sobre los mismos cuerpos carreteros, teniendo el vehículo las dos condiciones de llenado. Esto es, el recorrido a tanque vacío se efectuó en dirección opuesta sobre la carretera, en un cuerpo de vía diferente, lo que implicó en general, un diseño geométrico distinto del camino, así como los niveles de irregularidades del pavimento (rugosidad). Otro aspecto que hubiese sido interesante atender se refiere a la determinación de los perfiles de los pavimentos sobre los que se circuló en la autopista. La medición de los perfiles de los senderos donde circularon las llantas de los vehículos, habría provisto información acerca de la perturbación sobre el eje longitudinal del vehículo, derivada de la diferencia entre los perfiles izquierdo y derecho de los senderos interno y externo del carril donde circuló el transporte. Aunque esta perturbación es, en general, de relativa alta frecuencia para el rango normal de velocidad de circulación de estos vehículos, resultaría importante conocer la perturbación, en el contexto del análisis y discriminación del contenido espectral de la oscilación lateral del vehículo. La medición de esta perturbación, ligada al perfil del camino, podría representar una complicación mayor en el desarrollo de las pruebas, al involucrar complementos instrumentales para medir el perfil del camino (usando métodos mecánicos o de ultrasonido). Conclusiones Las simulaciones de la respuesta dinámica de los vehículos al ser sometidos a perturbaciones desde el pavimento y direccionales, hacen evidente la disparidad entre las frecuencias de excitación derivadas de la rugosidad del pavimento y las asociadas a las maniobras direccionales. De esta manera, la respuesta lateral del vehículo se afecta sólo de manera marginal por la rugosidad del pavimento. En el estudio, también se observó que, a excepción del pavimento de baja rugosidad, las perturbaciones derivadas del pavimento se distribuyen a lo largo de un amplio espectro de frecuencias, incluyendo las superiores a los 20 Hz. Sin embargo, en el caso de pavimentos de baja rugosidad, los contenidos espectrales se concentraron en bajas frecuencias. El análisis propuesto para calcular las aceleraciones laterales instantáneas de los vehículos durante su recorrido es de sumo interés, por lo que se refiere al establecimiento de una metodología que permita caracterizar las carreteras con base a las aceleraciones laterales que la circulación representa para los vehículos. Bibliografía Aquaro, M.J.; Mucino, V.H.; Gautam, M. y Salem, M A. Finite Element Modeling Approach for Stability Analysis of Partially Filled Tanker Trucks, SAE. paper 1999-01-3708. 1999. Ashby, J.; Ensminger, A.; Razo, A. y Rivas, E. Experimental and Simulated Tanker Truck Sloshing. West Virginia University Students Summer Visiting Report. Instituto Mexicano del Transporte. 48 pp. 2002. Clark, B. A., et al, Dynamics and Roll Stability of a Loaded Class 8 Tractor-livestock Semi-trailers. SAE. paper 1999-01-3732. 1999. El-Gindy, M. An Overview of Performance Measures for Heavy Commercial Vehicles in North America, Int. J. of Vehicle Design. Vol. 16, Nos. 4/5, pp. 441-463. 1995. Elmore, C. W. and Heald, M. A. Physics of waves. Dover Publications, Inc. New York. 1989. Ervin, R. D.; Mallikarjunarau, C. y Gillespie, T. D. Future Configuration of Tank Vehicles Hauling Flammable Liquids in Michigan, Final Technical Report. The University of Michigan Highway Safety Research Institute. UM-HSRI-80-73-1, 239 pp. 1980. Fancher, P. S.; Ervin, R. D. y Winkler, C. B. A Factbook of the Mechanical Properties of the Components for Single - unit and Articulated Heavy Trucks. The University of Michigan. Transportation Research Institute. Gillespie, T. Heavy Truck Ride, SAE. Paper 850001. 1985. Higdon, A.; Ohlsen, E. W.; Stiles, W. B.; Weese, J. A. y Riley, W. F. Mechanics of Materials. John Wiley and Sons. Nueva York. 753 pp. 1976. Hildebrand, R. Aspects to Consider Relating Tank-trucks Stability. Notas de trabajo. Instituto Mexicano del Transporte. 2002. Popov, G.; Sankar, S. y Sankar, T S., Optimal Shape of a Rectangular Road Container, Journal of Fluids and Structures. Vol 7, pp 56-86. 1993. Raju, S. Isaac. Influence of Road Roughness and Directional Maneuvers on the Dynamic Performance of Heavy Vehicles. M S Thesis. Concordia University. Department of Mechanical Engineering. 1998. Rakheja, S.; Ranganathan, R. y Sankar, S. Field Testing and Validation of Directional Dynamics Model of a Tank Truck, International Journal of Vehicle Design. Vol 13, No. 3, pp 251-275. 1992. Romero Navarrete, J. A.; Ramírez Cano, O.; Fortanell Romero, J. M. y Hildebrand, R. Caracterización experimental del oleaje en tanques, Reporte de Avance IMT-PEMEX-G10-03. Instituto Mexicano del Transporte. 94 pp. 2002. Romero, J. A. La respuesta dinámica de un cuarto de carro y el índice internacional de rugosidad. Publicación Técnica No. 67. Instituto Mexicano del Transporte. 1995. Romero, J. A., et al. Modelado de la interacción carga sólida – vehículo. Publicación Técnica No. 189. Instituto Mexicano del Transporte. 2002. Romero, J. A., et al. Influencia de la rugosidad del pavimento sobre la respuesta direccional de vehículos articulados. Publicación Técnica No. 157.| Instituto Mexicano del Transporte. 2001. Smartmeter. User Manual. 1990. Strandberg, L. Lateral Stability of Road Tankers, VTI. Report No 138 A. Vol 1. Suecia. 1978. Winkler, C.; Bogard, S. y Zhou, J. The Dynamics of Tank-vehicle Rollover ant the Implications for Rollover-protection Devices. Final report UMTRI-98-53. The University of Michigan. Transportation Research Institute. 1998. La edición del presente artículo fue elaborada por * Síntesis del documento: ROMERO, José Antonio; Juan Carlos GÓMEZ; Oswualdo RAMÍREZ; Jesús FORTANELL y Robert HILDEBRAND, “Estudio de la causalidad para la oscilación lateral de vehículos pesados”, Publicación Técnica No. 220, Instituto Mexicano del Transporte, Sanfandila, Qro., 2003.
|